-
AROWEEK 13
Bram van den Nieuwendijk This week I continued working on the assembly. I realized I needed to make some connection parts for the servo that rotates the top part because the adapter was missing. This meant I had to recut some new gearwheels, and the rotation of the top part is now working well. I…
-
AutoBalance Final Week 14 & 15
Week 14: Salim & Mohammed Ø: This week we got the MPU6050 sensor that we needed. We planned this week to make the final prepration for the end product. We played around with the sensor and found out that we needed the y-axis, and not the x-axis, this would be the best way to set…
-
Hydrawlics Final Blogpost
Hello and welcome back!👋 This week was time for final integration. See individual parts before integration at the top, and the section about integration in the second half. It has been fun! Fredrik: For the final weeks of the project, I have primarily been working on the hydraulic system, trying to figure out how to…
-
PickMeBot-week 15 (Final post:))
The final blog post has finally arrived, and looking back, it’s a bit surreal to realize how far we’ve come. Fourteen weeks ago, we set out with a simple idea: build a working PickMeBot. At that point, it felt like a huge challenge, and we honestly didn’t know how many unexpected problems and late-night debugging…
-
Week 15 & 16 (Final)
Wang This week I have been mostly focused on doing decent game development since we had the last inleveing this Thursday. But I worked with smart systems on Friday before I start practicing for santid systems. I have now set up that they will constantly search for verandre to di finer verandre, but when they…
-
ASTROROVER – WEEK 14&15 – FIRM HANDSHAKES
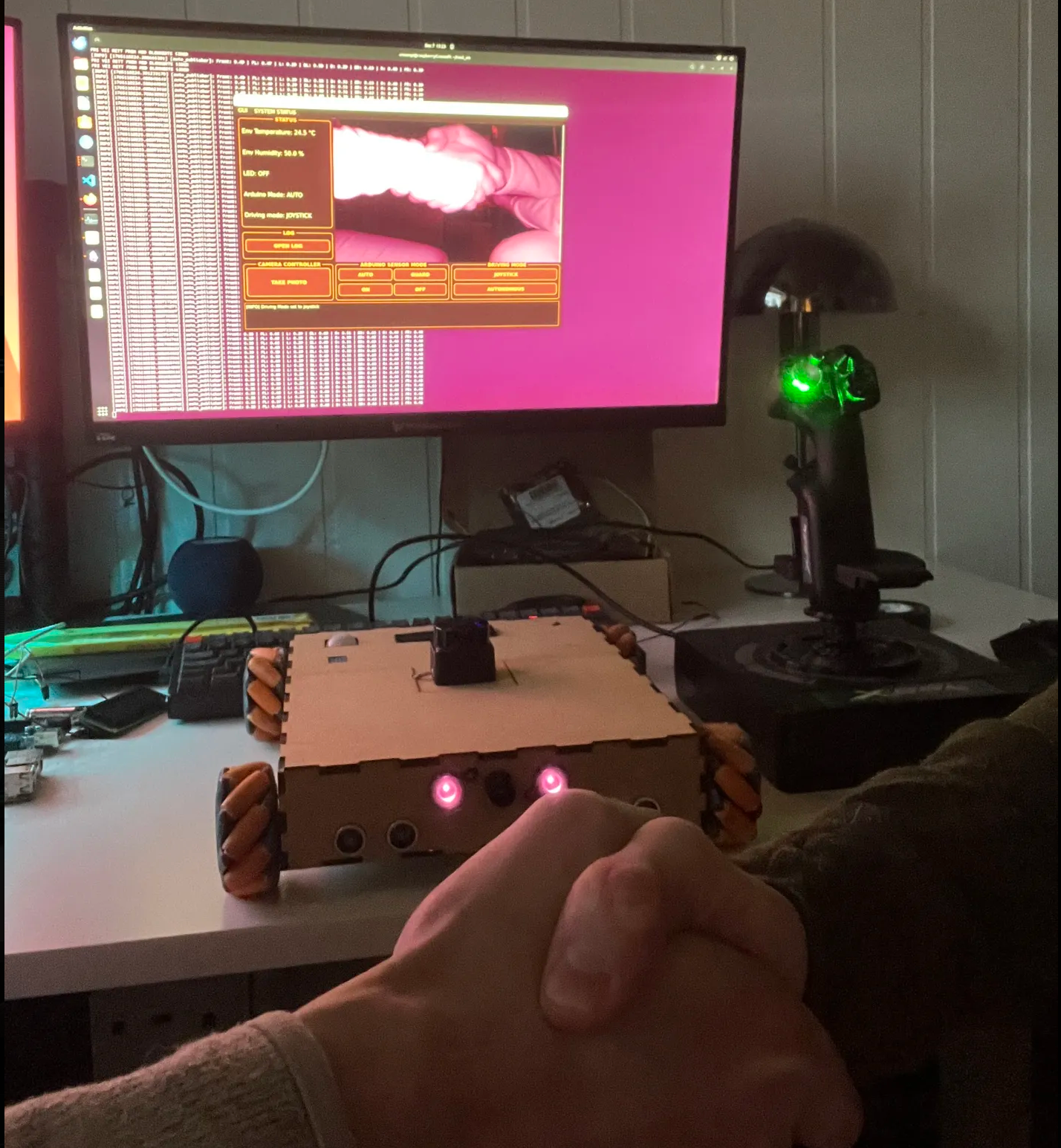
Sander & August Presents: THE ASTROROVER PROJECT https://github.com/augustkode/TheAstroroverProject Abstract This final blog sums up Sanders and Augusts work. The theme of this project is space. The task was wide, and provided us significant freedom of exploration and opportunities to grow within systems and computer engineering. From here we derived the problem domain and ultimate goal:…
-
PickMeBot-week 14
Sondre: This week I worked together with Theo to connect our two main parts of the robot system. Theo has been working on the A* pathfinding code that figures out the route through the maze, while I’ve focused on the movement side, making the robot drive straight, turn correctly, and fix its heading using the…
-
Week 14
Wang Last week, I established a connection between the micro:bit v2 and the joystick. This week, I configured the Bluetooth communication to transmit joystick data to a receiver micro:bit v2. The system is designed to pair automatically upon startup, the receiver scans for a specific identifier. Simultaneously, the controller broadcasts its signal immediately upon being…
-
PickMeBot-week 13
Sondre: This week I focused on improving the navigation and stability of our mecanum robot. One of the main problems earlier was that the robot often confused a wall with a box, since the ultrasonic sensors saw both situations almost the same way. To fix this, I added a simple verification step where the robot…
-
MiniMuck – Week 13 – Demo
Hello Wørld! The last official week of the MiniMuck project consisted of merging, integration, launch scripts, testing, filming and reflections on the decisions made and what the project became. Summary of the Project To summarize the project, we have designed and developed a mechanical, electrical and software-based system for driving through terrain while mapping with…