Maskin
Anders:
Her er hele bordet modellert.
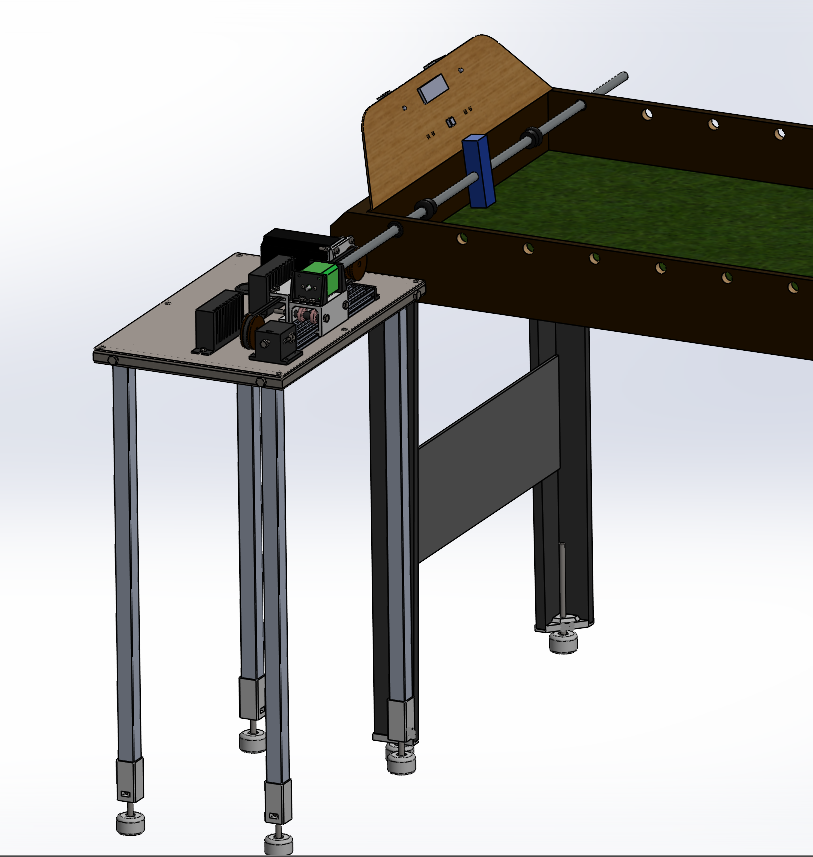

Et problem som egentlig har vært med hele veien og som er et hinder for å få bedre presisjon for hele mekanismen er at hele vogna “steiler” når spilleren enten roteres eller beveges frem og tilbake. Dette bør løses på en bedre måte, men er litt begrenset med tid og hva vi har hatt tilgjengelig av materiell. Problemet ved rotasjon har jeg simulert via FEM-analyse og er vist under.
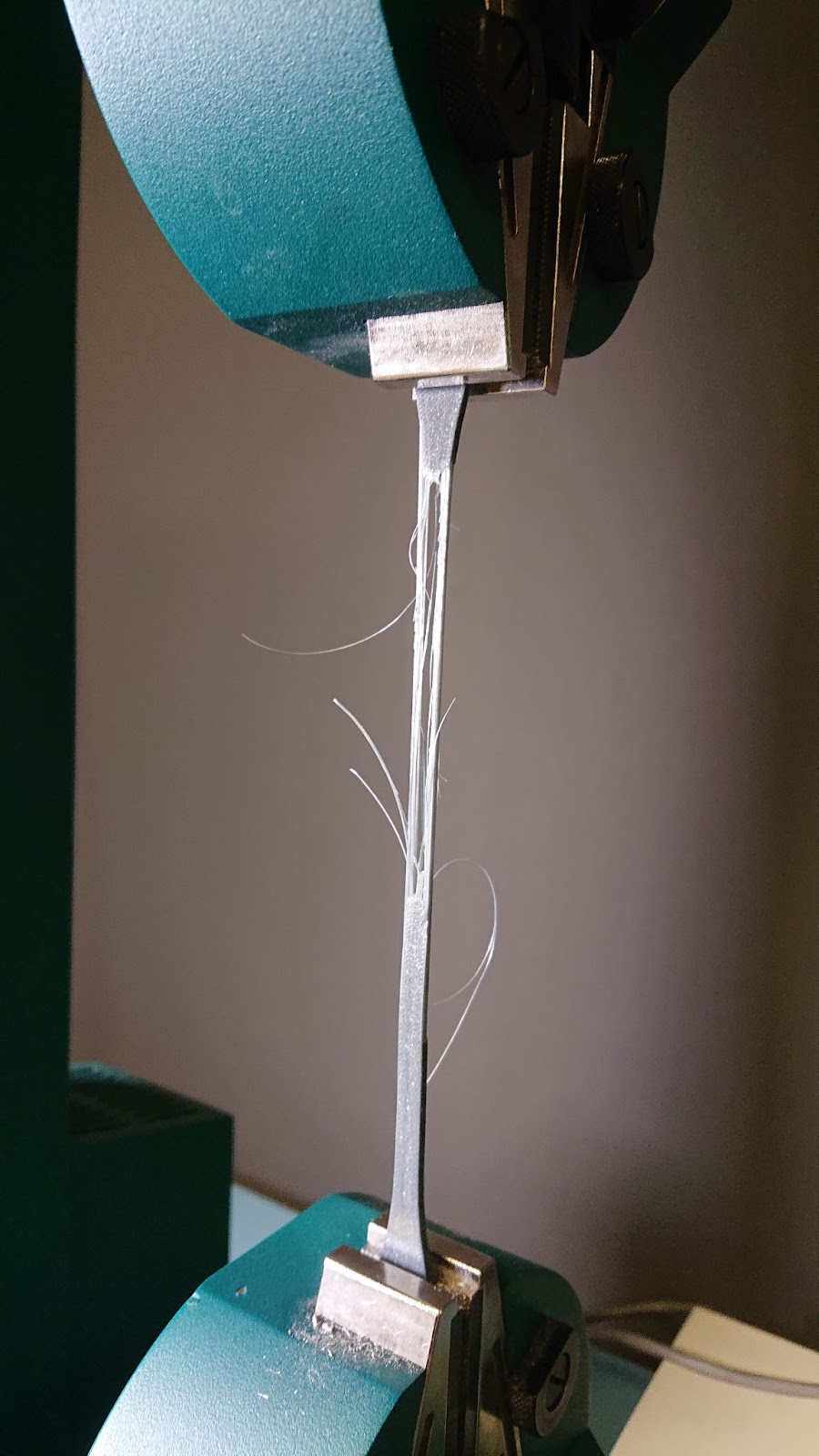
Reimskjøten som ble 3D printet i PLA(midterste bildet under) har vist å ikke være tilstrekkelig og sprakk. Den ble byttet ut med en skjølt printet i PETG og jeg tok også en strekktest i forbindelse med dette og fikk en forlengelse på 10 cm så dette burde vært tilstrekkelig. Men den gang ei! Denne røk på midten, så da ble neste 3D printet i ABS plast.
Andrea:
Denne uken har mitt arbeid for det meste gått ut på dokumentsamling til minnepennen som skal leveres. Det er satt opp et system for hvordan vi skal strukturere mappeoppsettet. Filer i fellesmappene er gått gjennom for å sjekke etter duplikater, og samling av egendokumentasjon er nå nesten ferdig.
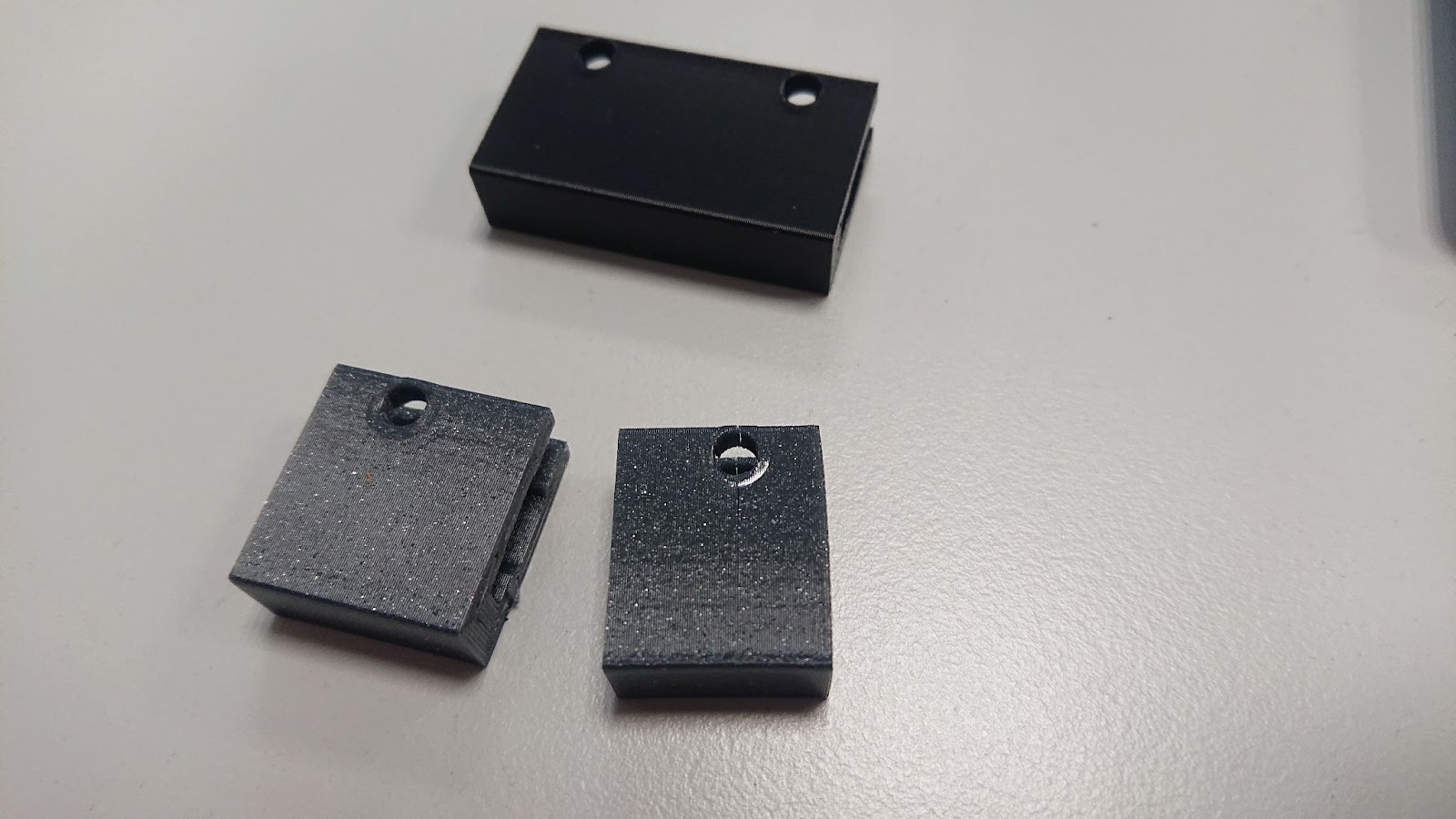
Neste uke skal jeg lage innkapslingen til motorene slik at det blir tryggere å spille for spilleren som har keeperen til hjelp. Siden bordet der motorene står ikke ble som gruppen planla, må alt måles opp på nytt og nytt forarbeid dukket opp på planen pga dette.
Data
Erik: Har vært mye testing av motor konfigurasjon i sammenheng med koordinatene til ballen. Finjustering av små tall i koden for å teste oppførsel av systemet. Dette tok tid, og mye repetivt arbeid. Små justeringene er blant annet: hastighet til ballen i sammenheng med at motoren skal reagere eller ikke og når den burde reagere. Prøver å justere for avvik i x- og y-koordinatene til ballen, der farge-gjenskjenning ikke er det mest nøyaktige. Dette kan skape sporadiske bevegelser i motorene.
Elektro
Kristian:
Mandagen gikk stort sett til feilsøking av IR diodene. Etter litt hjelp og noen tips av Steven fikk jeg den endelig til å registrere når IR strålen ble brutt og ikke, ved hjelp av koblingsskjema under. Det eneste problemet er at de to diodene må være ekstremt nærme hverandre for at det skal fungere.
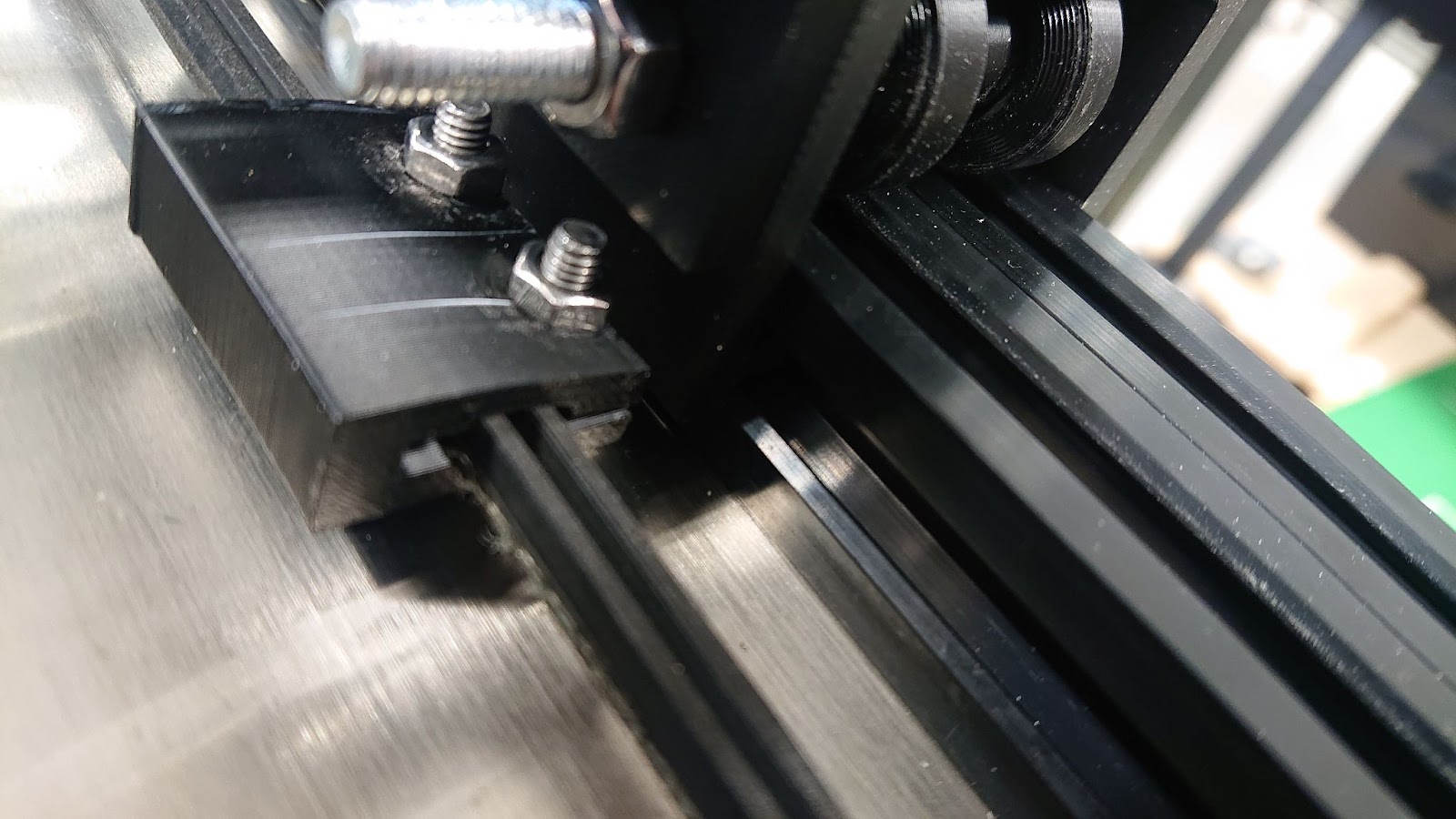
Dette er det lengste jeg kan ta diodene fra hverandre uten at den mister kontakt med transmitter.
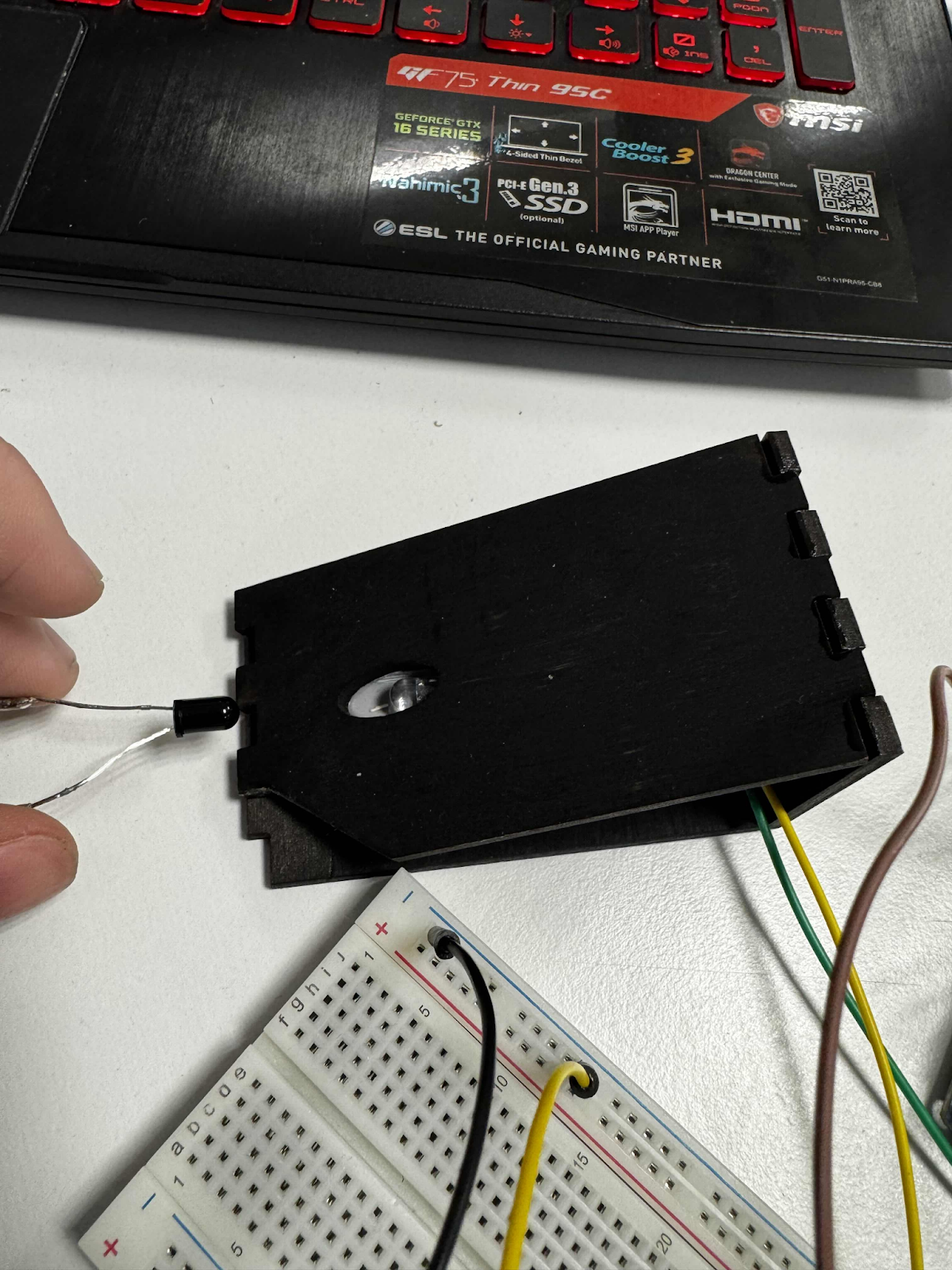
Etter litt mer research av Dag-Ove, prøvde jeg dagen etter på å koble receiveren motsatt vei, altså lengste benet på pluss og korteste på GND. Da økte avstanden jeg kunne ha mellom diodene betydelig som vist på bildet under. Neste er da å koble det opp på fotballbordet, dette gjorde jeg og Dag-Ove i samarbeid.
https://startrobotics.blogspot.com/2013/05/how-to-use-ir-led-and-photodiode-with-arduino.html
Dag-Ove:
Denne uken har tiden gått mest i å koble opp og feilsøke det endelige oppsettet for elektronikk-delen. 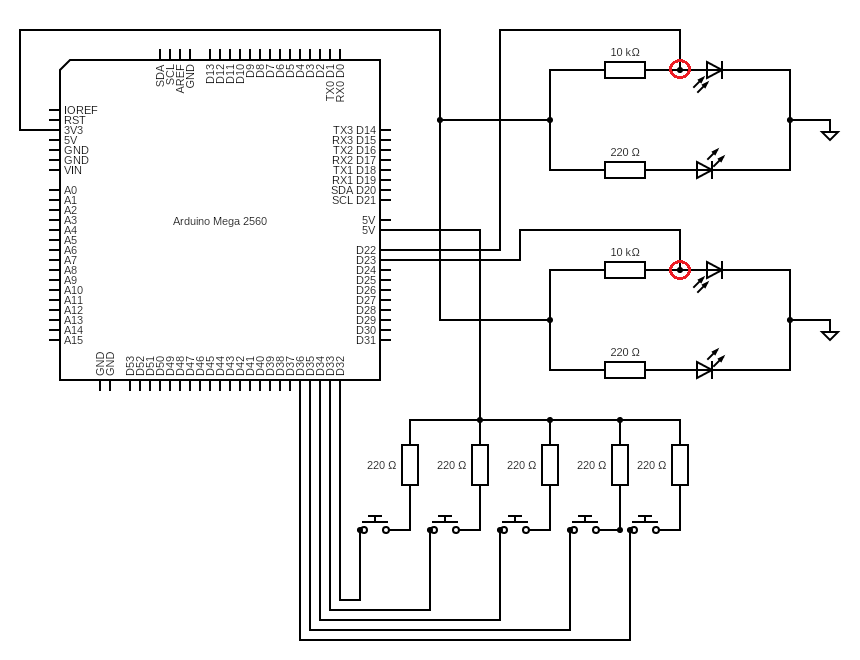
Skjemategningen viser den første utgaven med knapper, infrarøde sendere og sensorer. Her er knappene koblet til 5V og IR koblet til 3.3V. Mellom motstanden og anoden på IR sensoren er det koblet en ledning for å registrere spenningsfall når ballen bryter den infrarøde strålen, markert med rødt i skjemategningen. Som GIF-en viser, fungerte dette tidligere (GIF mangler innlegg Uke 9). Dette fungerte dog ikke i det endelige oppsettet, og ny runde med feilsøking måtte til.

(Viser ikke fullstendig oppsett med display og RGB)
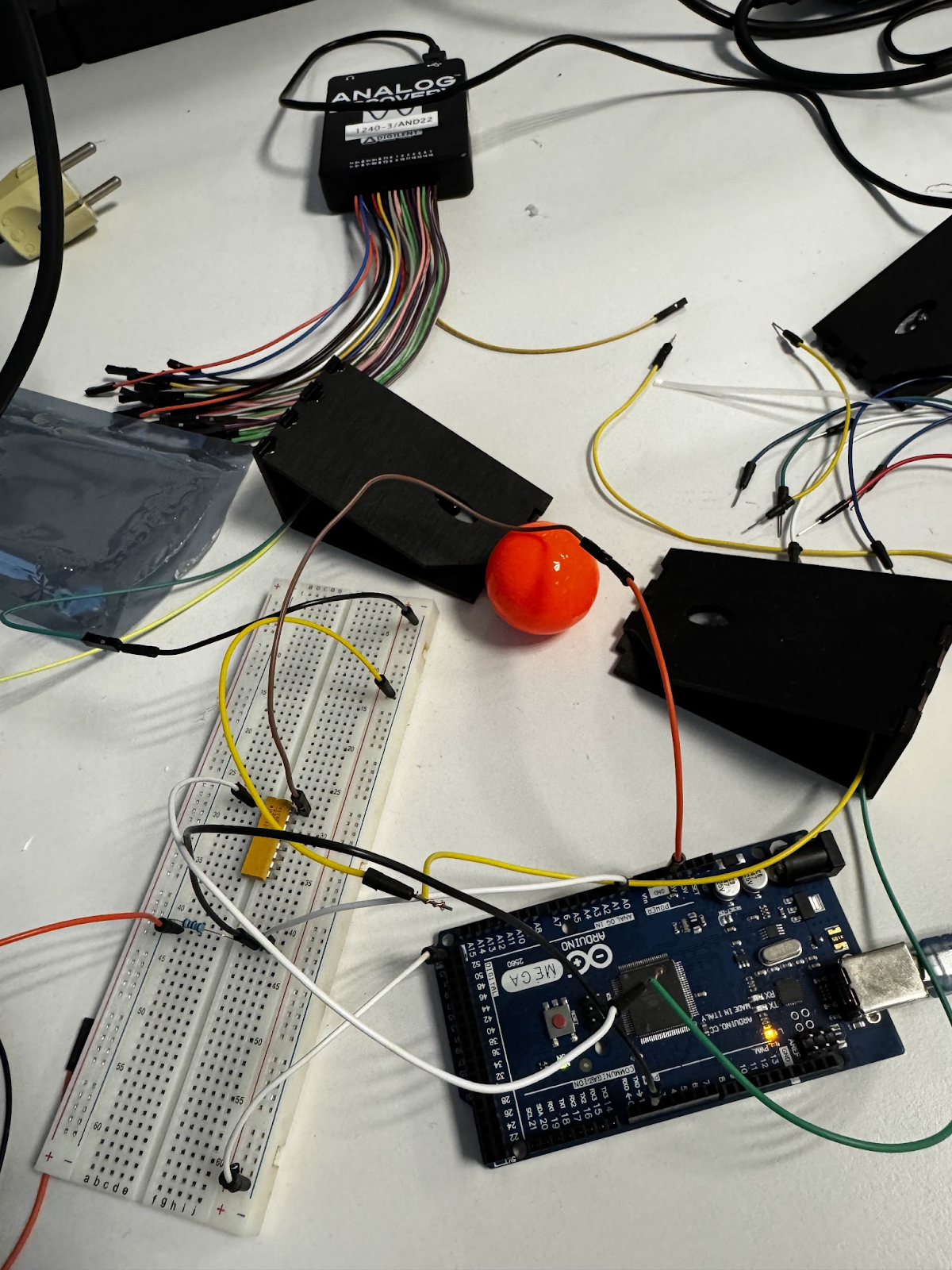
Her vises nytt oppsett med IR receiver som er koblet i reverse-bias, altså at dioden er koblet omvendt av hvordan “sunn fornuft” sier man skal gjøre det. Denne konfigurasjonen bruker også kobling for å registrere spenningsfall når ballen bryter strålen mellom IR sensor og receiver, men lar oss også bruke samme 5V spenningsforsyning til hele kretsen.