Mechanical Engineering
During week 9, I have continued to work on the design of the robotic arm, and started to create / design the base which the arm will be attached to.
Since it can be expected some vibrations from the servomotors, I have done a little research on different designs that hopefully will in some degree prevent the vibrations from affecting the accuracy of the arm to much, in terms of moving the chess pieces from one place to another. I found out from other people (google search), who have had to deal with the same problem, have had a positive experience using cycloidal gears.
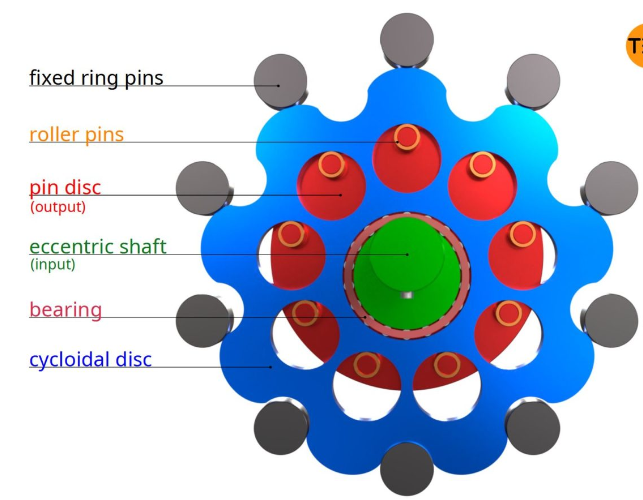
The principle for how a cycloidal disc / gear works, is that the main gear is driven around several pins, so that the main gear rotates around its own axis of symmetry. The design I am aiming for is much simpler, and consisting of only two gears run by one steppermotor, which will make the arm turn.
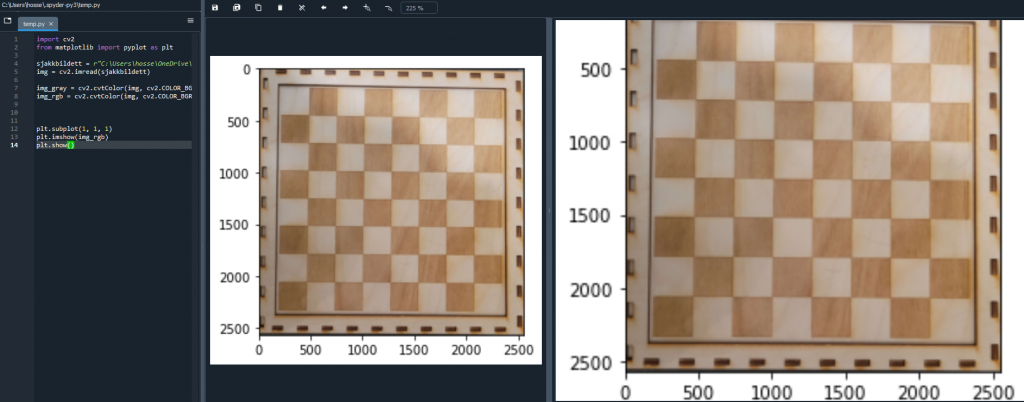
I have finished the chess board, but it turned out that the board was too small and I have to make the board again. I have updated the measurements, and only have to cut out the pieces before I engrave the plate with the tiles.
On Wednesday I got the arms / disk for the servomotors, and have been working on updating all the measurements for the screw holes and distances between the different parts. I will make a small model in plywood before I start to print all the different parts, just to make sure that the arm is working properly, and to detect any errors or mistakes I have made in the design before I print all the parts.
Workhours this week: 15,5 hours.
Liv Marte Olsen – Mechanical engineering.
Programmering av prototypen:
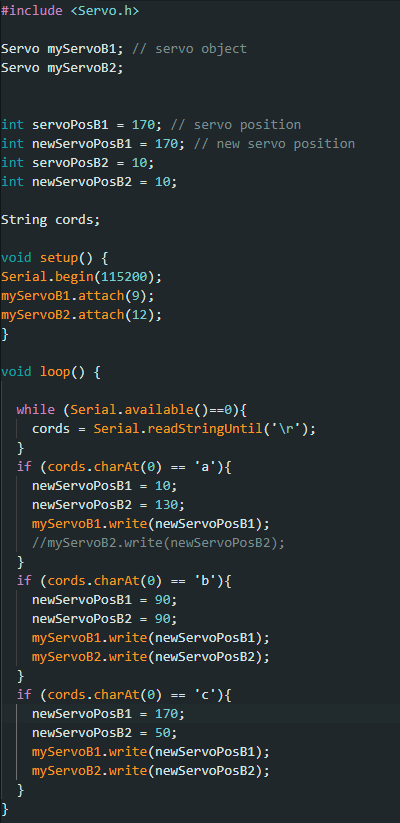
Testet prototype armen ved å se om alle motorene kan fungere samtidig. Den ene servo motoren ser ut til å gå i 360 grader og bør byttes. Prøvd å få plukke funksjonene til å fungere men det må en del testing til for å få det til. Fikk ikke det nederste leddet til å fungere, men mistenker at jeg må bruke forskjellige grader siden det er 2 servomotorer som peker mot hverandre og i tillegg til at jeg må finne ut hvilke grader begge motorene er stilt til når de står parallelt. (5 timer) (5 timer)
Foreløpig kode for arm:
Kevin Johansen – Computer engineer
Jeg har undersøkt flere sjakk algoritmer, prøver å implementere forskjellige vanskelighetsgrader og eventuelt starts metode. Siden armen ikke er ferdig og vi ikke trenger to personer på armen foreløpig, så har vi fordelt oppgaven mellom oss, så jeg skal se og være med på litt av hvert, som camera detection, også har jeg sjekket ut en metode på finne plassering av det som blir detected av camera detection, det vil da komme i en X og Y format, og derfra skal jeg lage et program som inneholder alle 64 firkantene på sjakkbrett med X-Y koordinater, for å logge bevegelsene som skjer, altså gi koordinater til algoritmen.
Dette vil være veldig nødvendig når det kommer til å fortelle algoritmen og armen hva som har blitt gjort, med dette så vil alt kunne logg-føres og kan hver “bevegelse” kan bli sendt som et bildet der den leser av posisjon også sender koordinaten i form av f.eks h2h3 der “h” er posisjon 8 på X aksen og 2 er 2, og 3 er 3, ser på dette tilfelle vi ikke får ut noe spesifikke koordinater fra Computer vision delen.
Hossein Sadeghi, Computer science.
Computer Vision
I didn’t complete any work last week since I had two exams that I needed to pass in order to begin my bachelor project the next semester.
I did visit Zoran at his workplace to pick up a Raspberry Pi 3B+, which I will test soon. I can’t yet continue working on the new one because Joakim still has the SD card and power supply from the Raspberry Pi 4 I previously had.
I had Covid this week, which is why I was unable to attend class.
Chess pieces
I’ve decided to paint every chess piece so they stand out more to the camera. White symbols will be assigned to the black pieces, and black symbols to the white pieces. As a result, the computer vision model will be significantly more accu
Computer Vision
Raspberry pi 3b+
In order to test the brand-new Raspberry Pi 3B+ that Zoran had given me, I began the week by picking up my SD card and power supply from Joakim.
After installing Ubuntu on my memory card, I placed it into the Raspberry Pi. The Pi’s green LED didn’t flash and didn’t even light up. This made me a little less motivated, since I had already done a lot of debugging on the other device and knew what this meant. The green LED is supposed to signal the SD card, and when its being written to, so it not blinking when I inserted the SD card with the operating system on it, wasn’t a good sign.
I tested all the different things I attempted on the prior model from week 6 even though I had little hope for it. Unfortunately, I also had no luck getting this one to operate. I spent close to 4 hours troubleshooting.
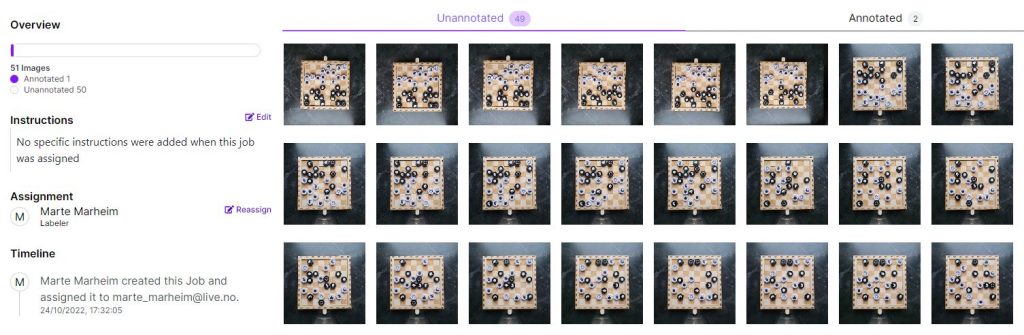
Continuing the annotation process
Tuesday saw the addition of 75 more images for the dataset, which I annotated in a process that took me around 3 hours.
at school
On Wednesday, Liv Marte and I met up at the school at 8:30, and I joined her as she used the laser cutter to cut out the chessboard.
After that, I went to Dag for assistance with my Raspberry Pi issue, and he had a another Raspberry 3B+ that we tried with my SD card and it actually worked! I finally had some success with the Pi, but when I attempted to continue the annotation process, I discovered that all 150 of the completed images was gone…
All I could do was start over, which I did. Before I left for home at 13:00, I had annotated 50 images.
Hours on the project this week: 11,5
Marte Marheim, Computer Science