Helge Sondre Ulberg, Oriana Presacan.
We have been working on the candidate list for the chess pieces. Where we are supposed to detect something on the board, and to then later be able to classify each object.
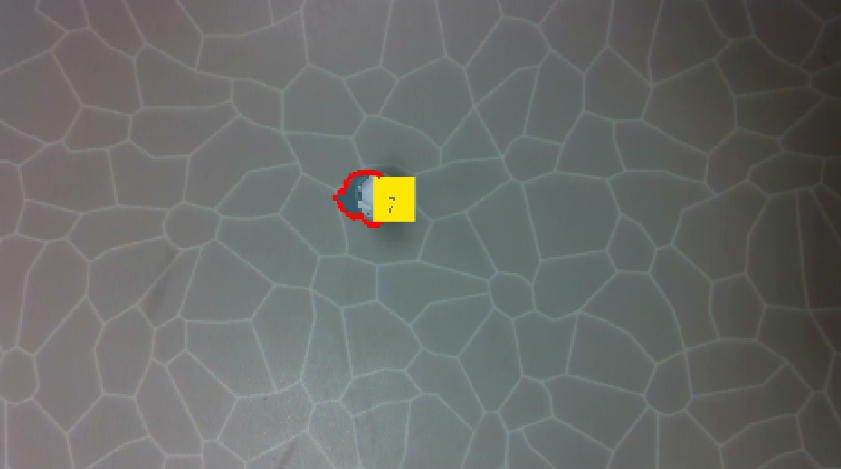
Using a T shape algorithm to find the width and height of each object. and then to know where the center of the object is.
Sondre and Ole Henrik:
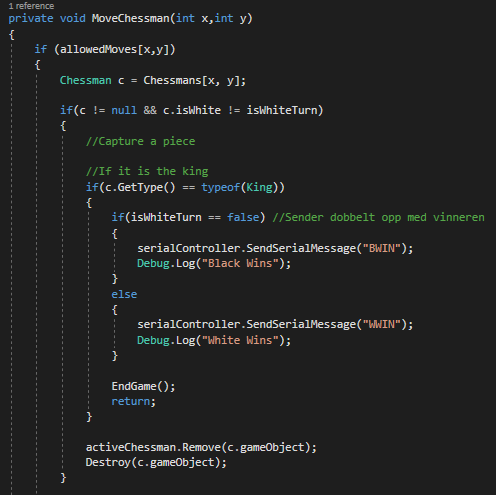
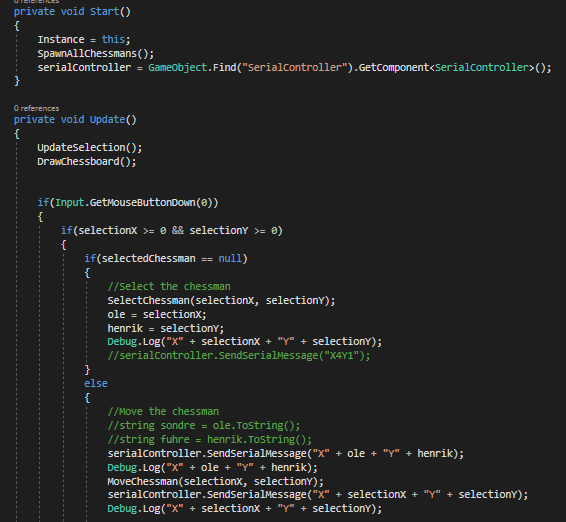
This week we managed to get the Unity chess program to send the coordinates of the pieces played and coordinates of the square selected to Arduino, with a buffer with characters. As well as the winner, when either`s side king is captured.
Stian Bergstrøm:
For this Week I have been working on the axis system. I had some issues with the aluminium tubes that I am using. The tubes was not all the correct size. I had not measured to see if they was accurate when i bought them so the 3d printed parts was designed with the rods beeing 8mm. In reality the rods was inbetween 7.7 and 8.3mm. Almost all the 3d printed pieces needed then to bo sanded a little bit to be able to fit the rods. I also needed to file down the rods so they would be able to fit the ball bearings. The next step is to place and tighten the string for the motion.

For the electronic I have made some changes on the silkscreen layer for the PCB. I needed to remove unwanted text that is left from gathering a few footprints from the Arduino PCB. After Removing the unwanted text and made the silkscreen a little tidier i made the Gerber file so that the PCB could be ordered. The issue is that it looks like I won’t be able to recieve the PCB in time. The components for the board will definetly not arrive in time so for the rest of the course we woul dneed to use breadboards for the components.