Project Overview
Mini Muck is a project inspired by Project LOOK and Menzi Muck. The Menzi Muck is a multipurpose, multi-terrain traversal vehicle, with its wheels on adjustable arms. By combining the two, the project plans to make a vehicle that is able to navigate through difficult terrain while mapping its surroundings.
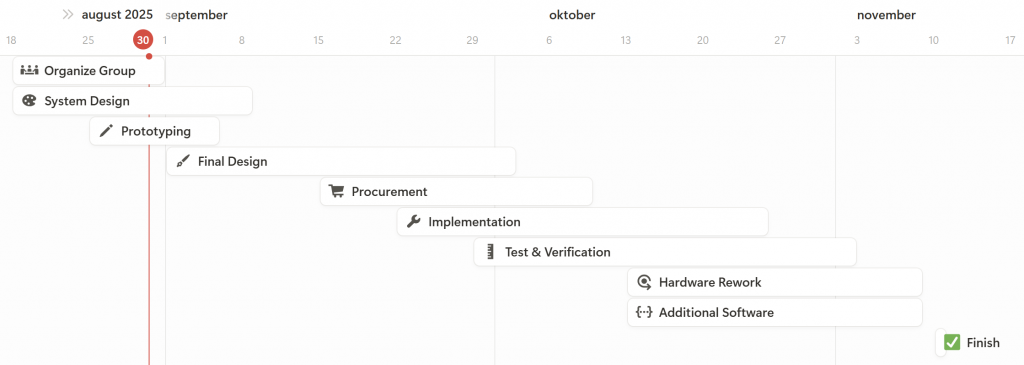
The initial schedule for the 13 weeks of this project is mainly hardware oriented, while software will work around this schedule with software releases tied to features.
Mini Muck is a multidisciplinary group that consists of:
- Leon Brattli Hansen – Software (Robotics), Systems
- Ask Helmersen – Software (Perception), Systems
- Sara Børresen – Software (GUI)
- Herman Darjes – Electronics, Systems
- Helle Hagen – Mechanical
To organize the project, we will use an agile methodology based on Scrum/Kanban, using a Kanban board to track tasks, while mainly using the Scrum methodology and terminology. To assist with this, we will use Notion for planning, task tracking and knowledge base. Microsoft Teams for file storage, and GitLab to coordinate simultaneous development of our codebase, electrical schematics and simulations.
The systems team of the group has made an initial overview of epics, features and user stories while facilitating smaller tasks.
Epic: Make a vehicle that is able to drive and map it’s surroundings.
Features\User Stories\Tasks
B — Map surroundings using a LiDAR sensor.
- as an operator I want to be able to see what the LiDAR sees so that I get an understanding of why the vehicle moves the way it does.
A — Drive the vehicle forwards and backwards
- as an operator i want the vehicle to drive so it is usable
B — Turn the vehicle
- as an operator i want the vehicle to drive so it is usable
B — Navigate based on LiDAR readings.
- as an operator I want set a waypoint so that the vehicle navigates autonomously
A — Visually present all data from the vehicle to the user
- as an operator I want to be able to see all sensor data so that I get an understanding of why the platform moves the way it does.
Epic: Level the vehicle dynamically, and adjust its ride height.
Features\User Stories\Tasks
A — Adjust the ride hight, pitch and roll using arms on each wheel
- as an operator I want the vehicle to be able to adjust it’s height, roll and pitch so that it can move over different terrain
C — Control the vehicle using arms associated to each wheel based on gyro and accelerometer
- as a LiDAR I want the platform to be stable so that i can map my surroundings in a plain surface