-
Everything works!
Over the course of the last few weeks, we have found a solution for focusing the camera and take pictures with the two buttons on the handle, these uses an interrupt function to not disturb the rest of the loop with delays. While working on this we found out we needed two more buttons, but…
-
We had some problems
We have tried to make the compass function of the gyro sensor to make the gimbal rotate, but while testing it we found out that the output from the compass is between about 20 degrees to 116 degrees. The problem is that the scale goes from 20 -> 116 -> 20, in other words if…
-
The parts has arrived!!
The new motion sensor named MPU-9150 has arrived! The new motion sensor contains a 3axis gyroscope/accelerometer/magnetometer and is hopefully what solves our “YAW” problem. The new chip has a digital compass that should make it possible to control the rotation axis. Last week we soldered a small circuit on our prototype shield. This circuit contains…
-
Things are coming together
Since we are going to use a joystick to overwrite the cameras position, we have decided we are going to place it on one of the handles. Therefore, we wanted to design a case for the joystick and 3D-print it, we had to make sure we could fit the case on the handle, while still…
-
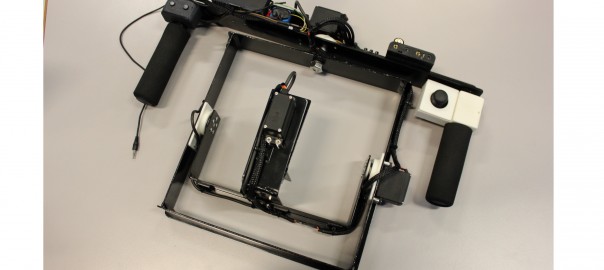
Small update
Our project is starting to look like a gimbal now, during the last week we have welded the aluminum materials. It’s now ready for repeated acid treatment before we paint it. The group have also made a fritzing sketch for how the electrical parts and wireing will look like.
-
Ready for welding!
Since the first blog post, the group have advanced in our progress. We have looked into different Arduino codes, tried making our own version of the code and we have tried it out with our servos. While trying it out, we ran into some problems with controlling one of our axis. We are going to…
-
Gimbal-3000 – Current process
This is the blog for the project Gimbal-3000, an project about the making of a gimbal for an DSLR camera. There are 3 members in the group, two cybernetics- and one virtual systems- student Cybernetics: Torbjørn Harsund and Ole Martin Rosbach Virtual Systems: Jonny Bråten We started off the project trying to find existing projects, using…