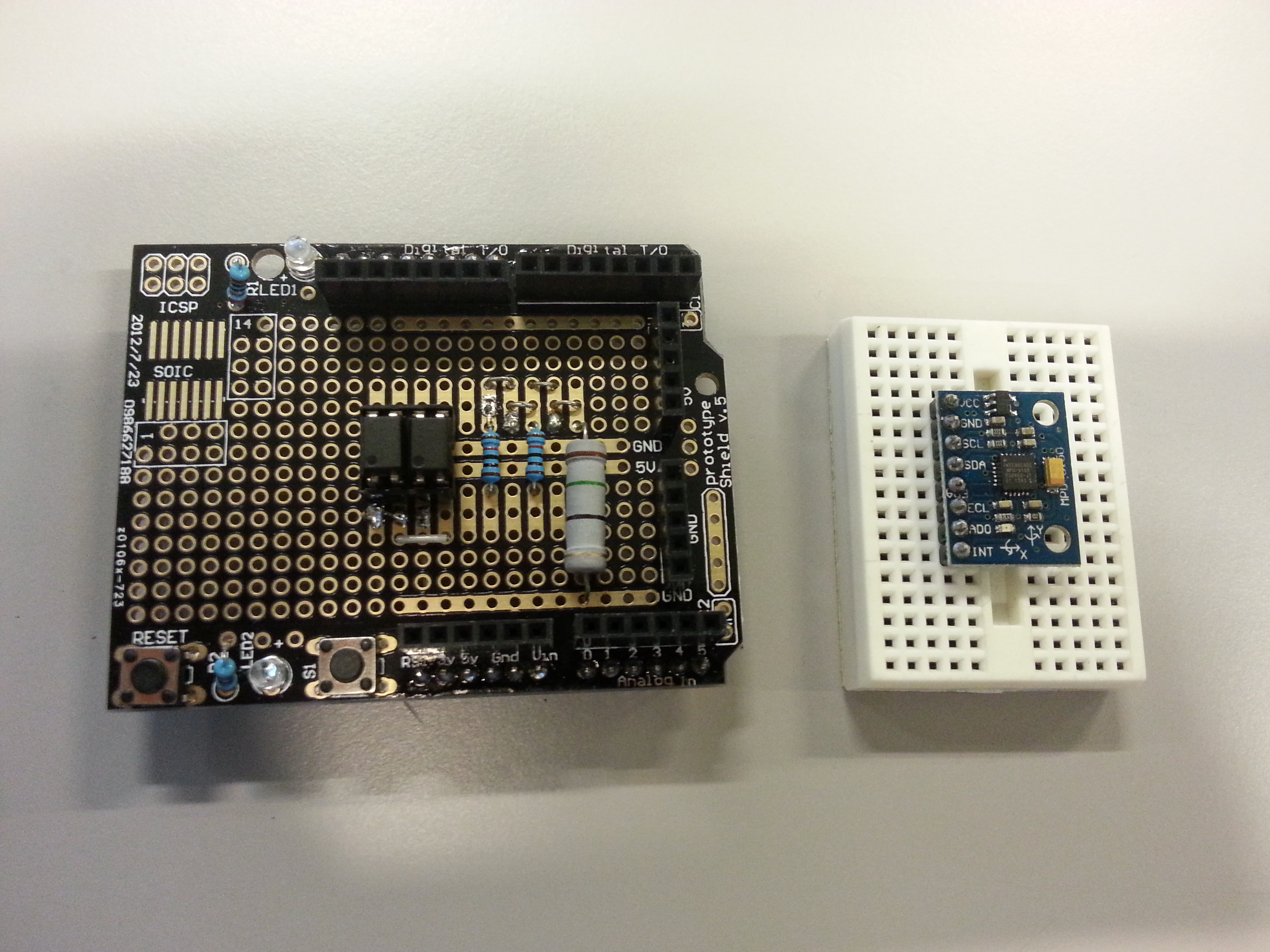
The new motion sensor named MPU-9150 has arrived! The new motion sensor contains a 3axis gyroscope/accelerometer/magnetometer and is hopefully what solves our “YAW” problem. The new chip has a digital compass that should make it possible to control the rotation axis. Last week we soldered a small circuit on our prototype shield. This circuit contains two optocouplers and a few resistors. The purpose of this circuit is to control the focus and shutter trigger on the camera. This is controlled by two buttons placed on the left handle on the gimbal. We also made a housing for these buttons. The connection to the Arduino-UNO is shown in the previous post named “small update”.
This week we focus on getting a functional code that serves all expected purposes for our gimbal. Implementing and testing the “compass” part of the motion sensor is our main focus. Trying to implement the joystick function will come next.