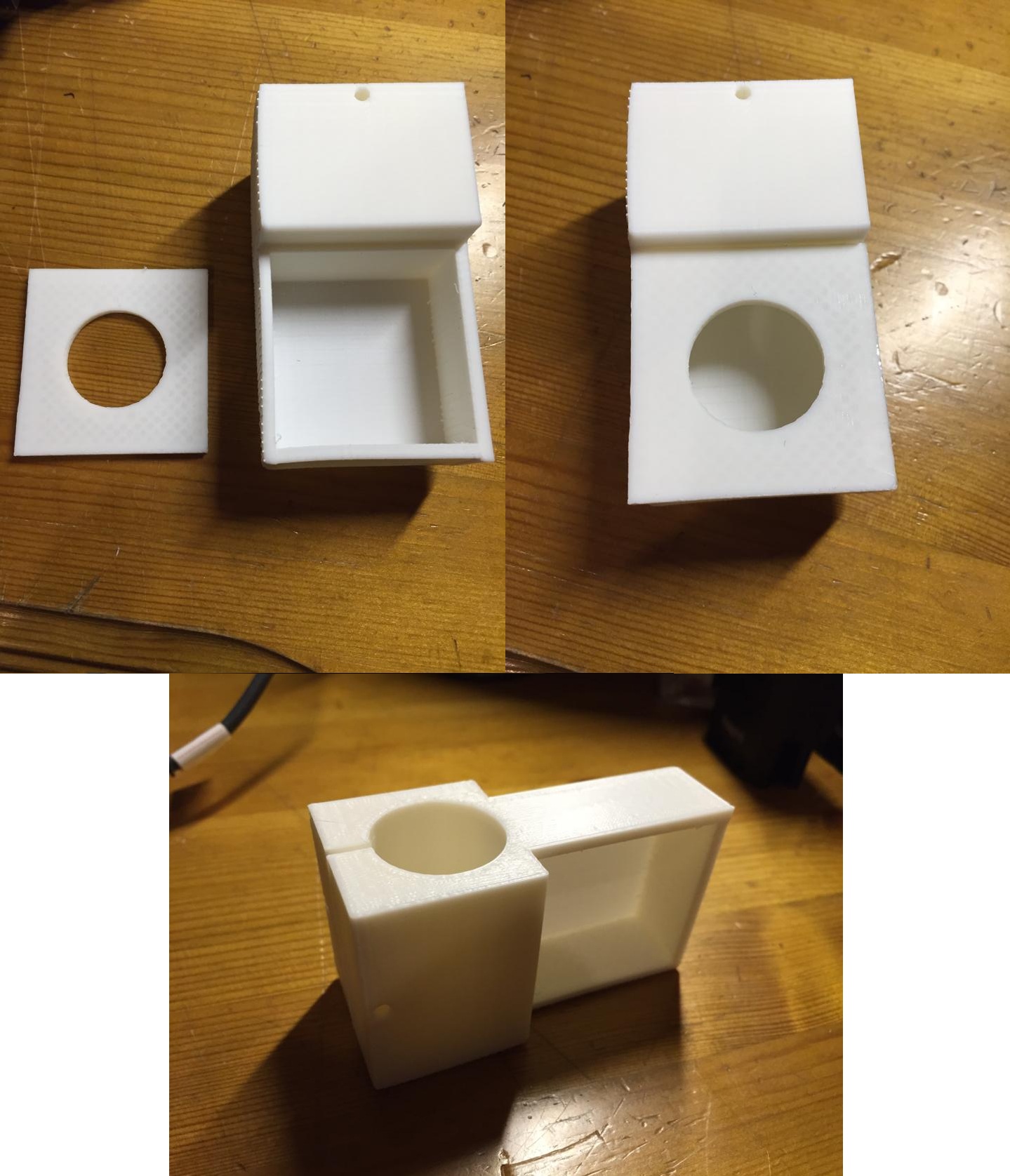
Since we are going to use a joystick to overwrite the cameras position, we have decided we are going to place it on one of the handles. Therefore, we wanted to design a case for the joystick and 3D-print it, we had to make sure we could fit the case on the handle, while still being able to move the joystick. The result is seen in the image under.
Since the start of the project, we have been trying to make a arduino code. While doing so we encountered some problems, using the gyroscope for longer duration made it inaccurate. To resolve this we are using a kalman filter, which uses a percentage of the accelerometer to make it more accurate over time. Another problem is that our gyro sensor does not include a magnetometer, we have ordered a new gyro sensor but we are waiting for the shipping.
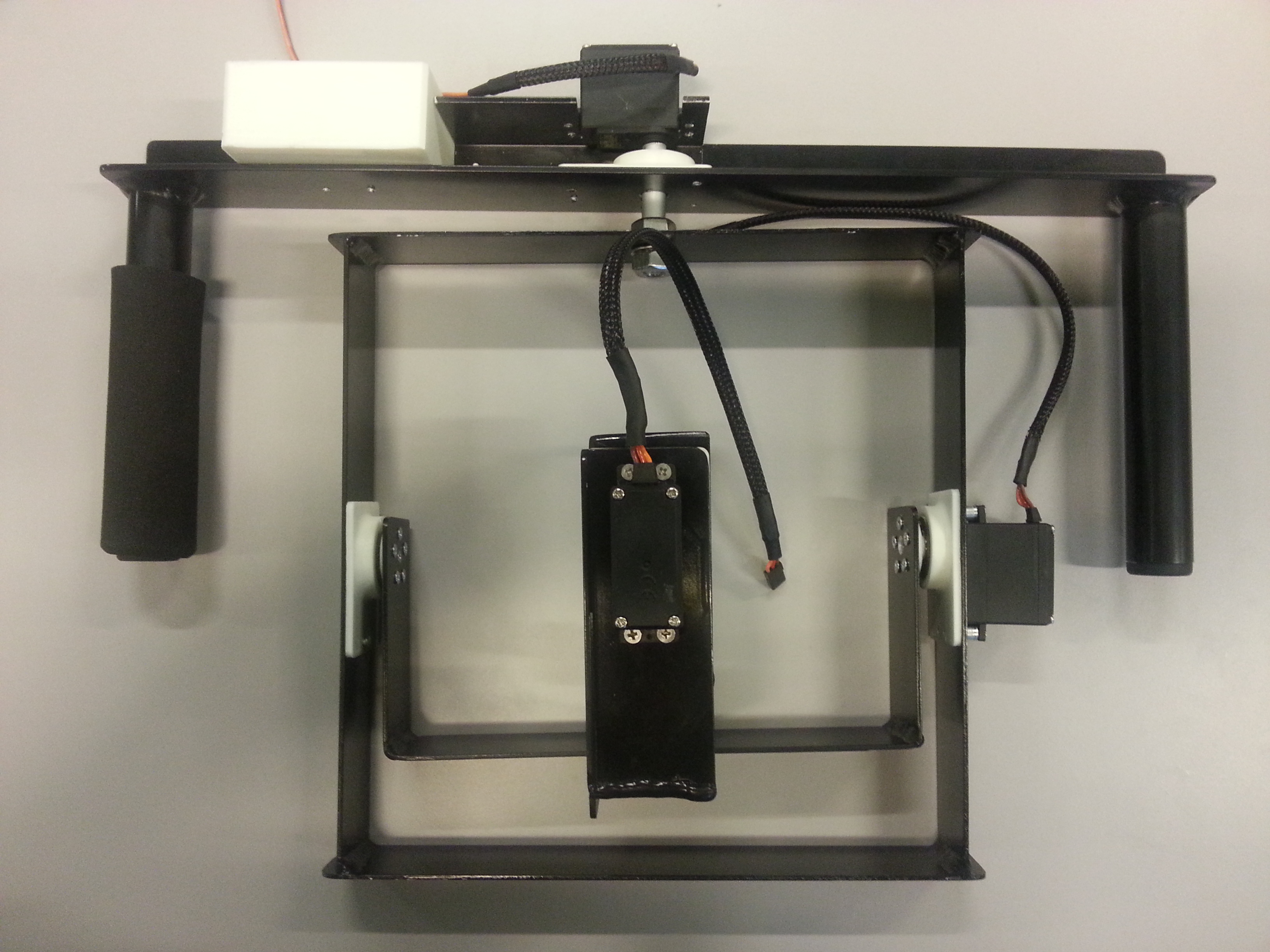
During the last week, the gimbal were painted black and the servos have been mounted. The next week we are going to make our arduino code better and do some testing.