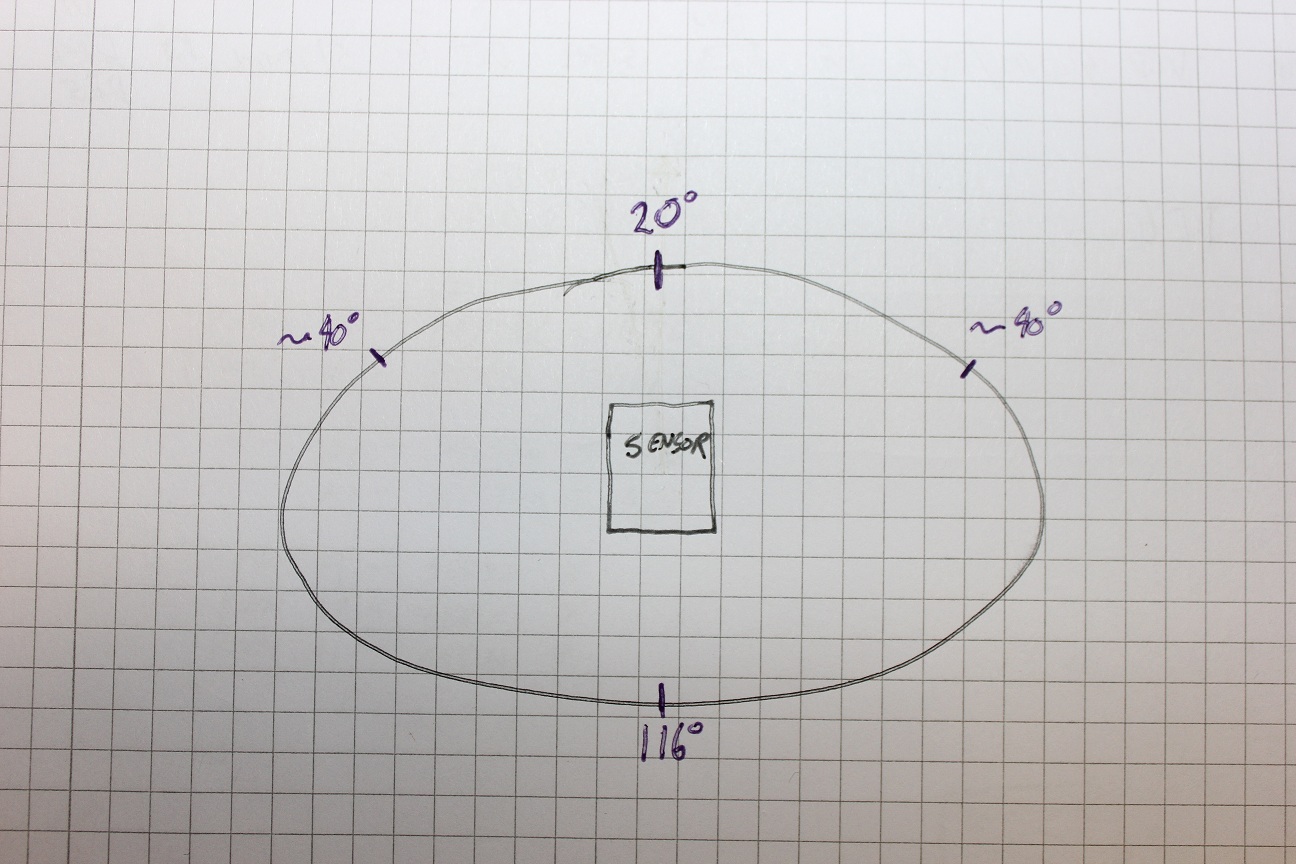
We have tried to make the compass function of the gyro sensor to make the gimbal rotate, but while testing it we found out that the output from the compass is between about 20 degrees to 116 degrees. The problem is that the scale goes from 20 -> 116 -> 20, in other words if we for example start at position A (20 degree), and we move the gimbal 13 degrees, then it’s hard to tell what direction it went. It also seems like the sensor gets affected by other compass sensor axises.
We experimented with temporary solutions which, when put into use, turned out to function far more satisfactory than we anticipated. In the end we found that we were able to adjust the rotation exclusively through the gyroscope, without it building up the drift we feared it would. It might not react to very slow and small rotations, perhaps depending on the placement of the MPU, but for our purpose it currently seems to be responding effectively and correctly.
Video av testen vår:
https://www.youtube.com/watch?v=5BV1VQguAyY&feature=youtu.be
Vi kommer til å bruke uken som kommer til å justere verdier og prøve å gjøre gyroen mer responsiv, i tillegg vil vi prøve å få til å ta bilde via knapper gjennom arduinoen.