Denne uken gikk med til videre planlegging, vi hadde planlagt å starte selve byggingen av konstruksjonen, men manglet en del utstyr, så dette ble ikke mulig. Vi videreutviklet designet litt, og bestemte oss endelig for at vi skal bruke roboten(bil), som automatisk kjører frem og tilbake mellom de ulike flaskene med glasset som drinken skal blandes i. Dette medfører at vi skal, i tillegg til en Arduino Due, bruke en Arduino Nano på roboten. Kommunikasjonen mellom roboten og selve drinkmikseren skal være basert på en radio transiver(NRF905).
Ellers har vi startet designet av de elektriske kretsene og simulert i MultiSim med testing av ulike komponenter. Det hjelper oss til eksakt å bestemme kretsdesignet og konkrete komponenter som f. eks type transistorer osv.
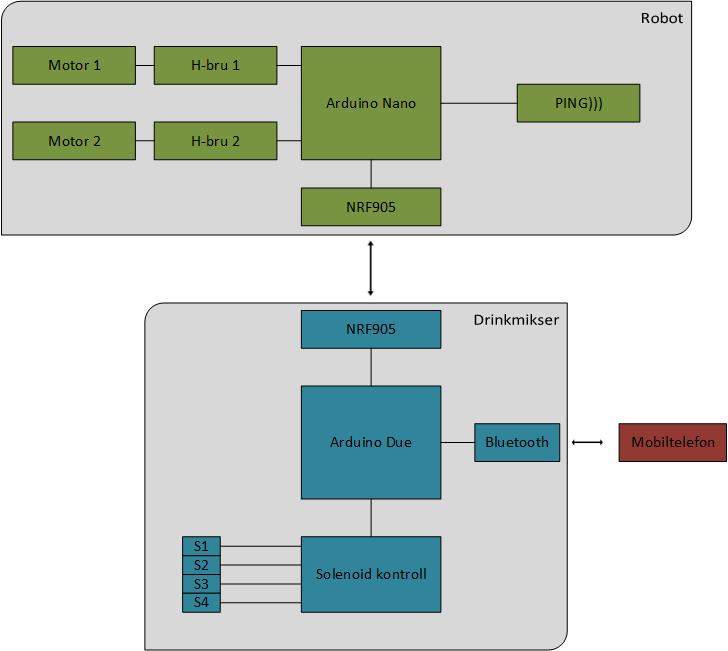
Vi utviklet også en oversikt i form av et blokkdiagram over systemet vårt og de ulike komponentene og et sekvensdiagram som beskriver signalflyten i systemet vårt. Det gir et mer helhetlig bildet av systemet.
Systemoversikt – blokkdiagram:
Sekvensdiagram :