Who Are We?
Welcome to our first blog post! Our group consists of six members, with two students from each engineering discipline. We are excited to collaborate on creating a self-driving robot capable of performing various complex tasks, such as autonomous navigation, object recognition, sorting, and more. We look forward to working together to bring this challenging and innovative project to life!
We will be updating this blog weekly to document our journey, sharing our progress, challenges, and successes along the way. Stay tuned for regular updates as we work towards our goal!
Team Members:
| Name | Discipline | Responsibility |
|---|---|---|
| Sokaina Cherkane | Software | software documentation |
| Hamsa Hashi | Software | Blog editor |
| Mikolaj Szczeblewski | Electronics | CEO Project Manager |
| Philip Dahl | Electronics | Electrical documentation |
| Kevin Paulsen | Mechanical | Mechanical documentation |
| Ruben Henriksen | Mechanical | Coordinator |

Tools
| Project management | Jira |
| Code management | Github |
| Design & analysis | Solidworks |
WEEK 1 & 2
We held our first meeting and established a communication channel. We began by reviewing various project proposals and sketching initial designs. After a thorough discussion, we agreed on developing a specific smart system. During the meeting, we also discussed the project in terms of our execution plan and identified the resources needed. Furthermore, we assigned various documentation tasks among the team members. We set a goal for each member to draft different system requirements before the next group meeting, which we can then review and consolidate to select the best options for this project. Overall, the meeting was very productive.
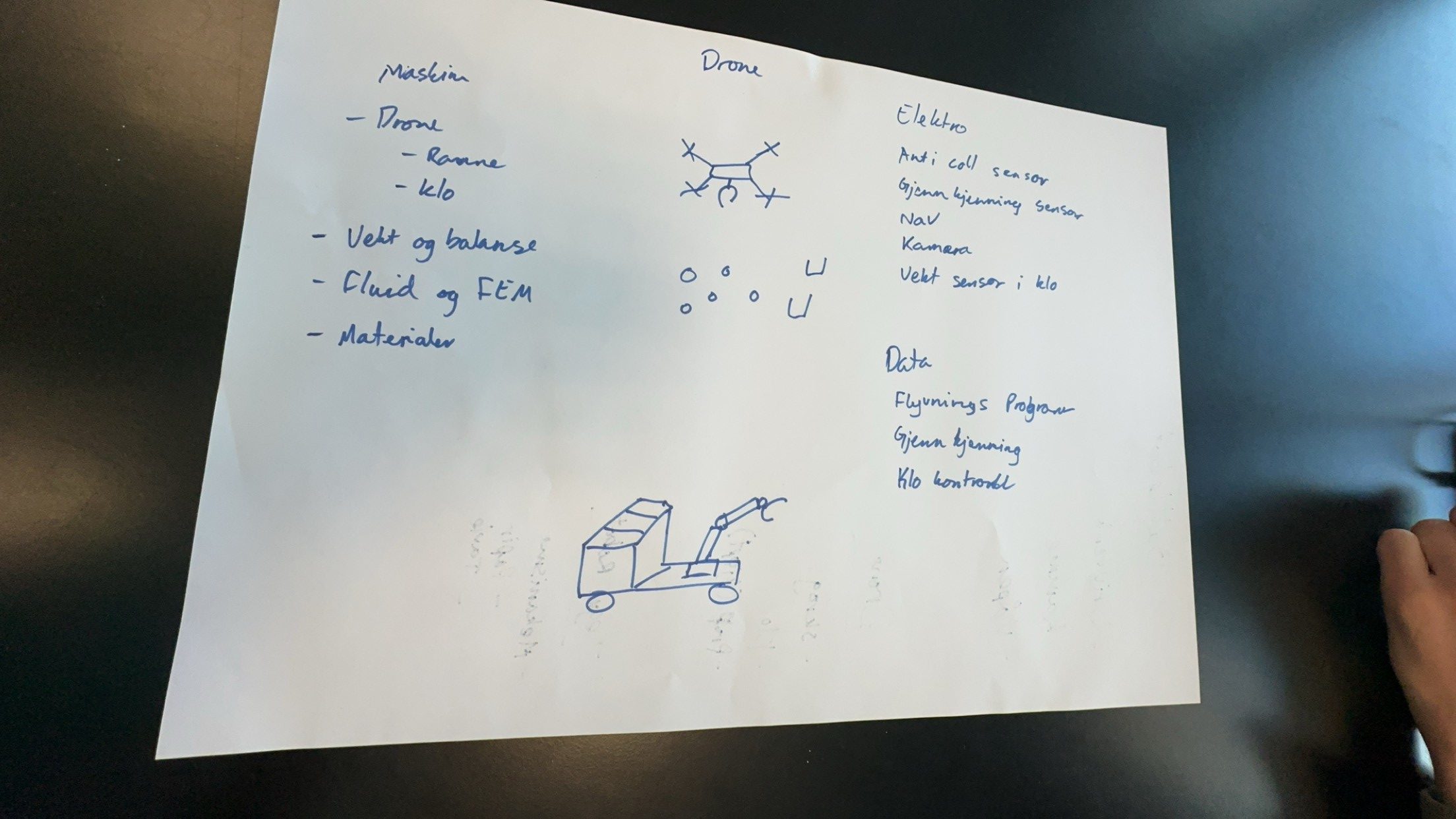
Sketching Ideas & Group Pic 🙂

During the second meeting, we determined the roles of the group members as listed above and agreed on the system requirements. By the end of the meeting, we had compiled our list of requirements. We also prioritized these requirements into categories: what needs to be done, what could be improved, and what could be added if time permits. You can see our requirements listed below.
System Description and Requirements:
The ToyzRgone system utilizes a camera for object detection and recognition, alongside a LIDAR sensor for object ranging. Once an object is recognized, the system will initiate an action where the robot drives towards the object and scans its exact location. A robotic arm, equipped with a built-in camera, will then pick up the identified object. Finally, the robotic arm will place the object into one of the containers located at the back of the robot, sorting it based on color. To give you a visual idea, imagine it as a robot cleaning up after your child has played and made a mess.
- A requirements (must be in place)
- B requirements (improvements)
- C requirements (if we have time)
| Requirement ID | Statement | Rationale | Verification | Priority |
|---|---|---|---|---|
| REQ-MECH-001 | The robot shall utilize an omnidirectional drivetrain to enable precise maneuvering in all directions. | To facilitate flexible and efficient navigation in confined spaces. | Test drive on various surfaces and a course with tights corners | A |
| REQ-MECH-002 | The robot arm shall be able to pick up objects up to (8x8x8) cm and weigh up to 100 grams. | To be pick up most common small toys. Like Hot Wheels and Lego. | To test this we will perform calculations, simulations and physically test by lifting and moving various objects. | A |
| REQ-MECH-003 | The robot shall have a intermediate storage with 3 compartments with space for 4x(80x25x25) mm (TBR) | The intermediate storage is for storing toys during operation and should be emptied when mission is done. The size requirements are TBR until the toys applicable are selected. | Fill and empty the storages | B |
| REQ-DATA-001 | The robot shall be able to navigate autonomously in an unknown environment with SLAM’s assistance. (Simultaneous Localization and Mapping). | For the robot to move freely and safely in various environments without a predefined map, it must be able to create and update its own map in real-time | To test this, place the robot in an unknown environment with obstacles and observe its ability to autonomously navigate using SLAM. | A & B |
| REQ-DATA-002 | The robot must be able to detect and classify objects such as Lego in different colors with an accuracy of at least 90%. | To ensure reliable sorting of objects, the robot must be able to accurately identify and classify objects based on color and shape, which is essential for the task it is designed for. | To test this, place Lego bricks of various colors in the robot’s environment. Use the robot’s sensors and software to detect and classify each Lego piece. Perform multiple trials and compare the robot’s classifications to the actual colors to calculate accuracy, ensuring it meets or exceeds 90%. | A & B |
| REQ-DATA-003 | The robot must be able to move without collision using a built-in collision avoidance algorithm | To avoid damage to itself, objects, or the surrounding environment, the robot must have the ability to recognize and avoid obstacles in its path. | Evaluate its mapping accuracy and obstacle avoidance over multiple trials to ensure consistent performance. | A & B |
| REQ-ELEK-001 | ||||
| REQ-ELEK-002 |
Next week
Based on the sketches and discussions, we have drafted a preliminary set of requirements for the robot’s navigation, object detection, and gripping mechanism. We plan for the Mechanical team to explore the design of the robot arm, the Software team to focus on algorithms for navigation and object detection, and the Electrical Engineers to look into power management and sensor integration. This is not yet finalized but is part of the planning process to develop an autonomous smart system from scratch. We value input from all team members and are planning effectively to find the best solutions that will help us achieve the final goal. Se you next week 🙂