Hei!
Denne oppdateringen går igjennom det som har blitt gjort mandag 1. desember.
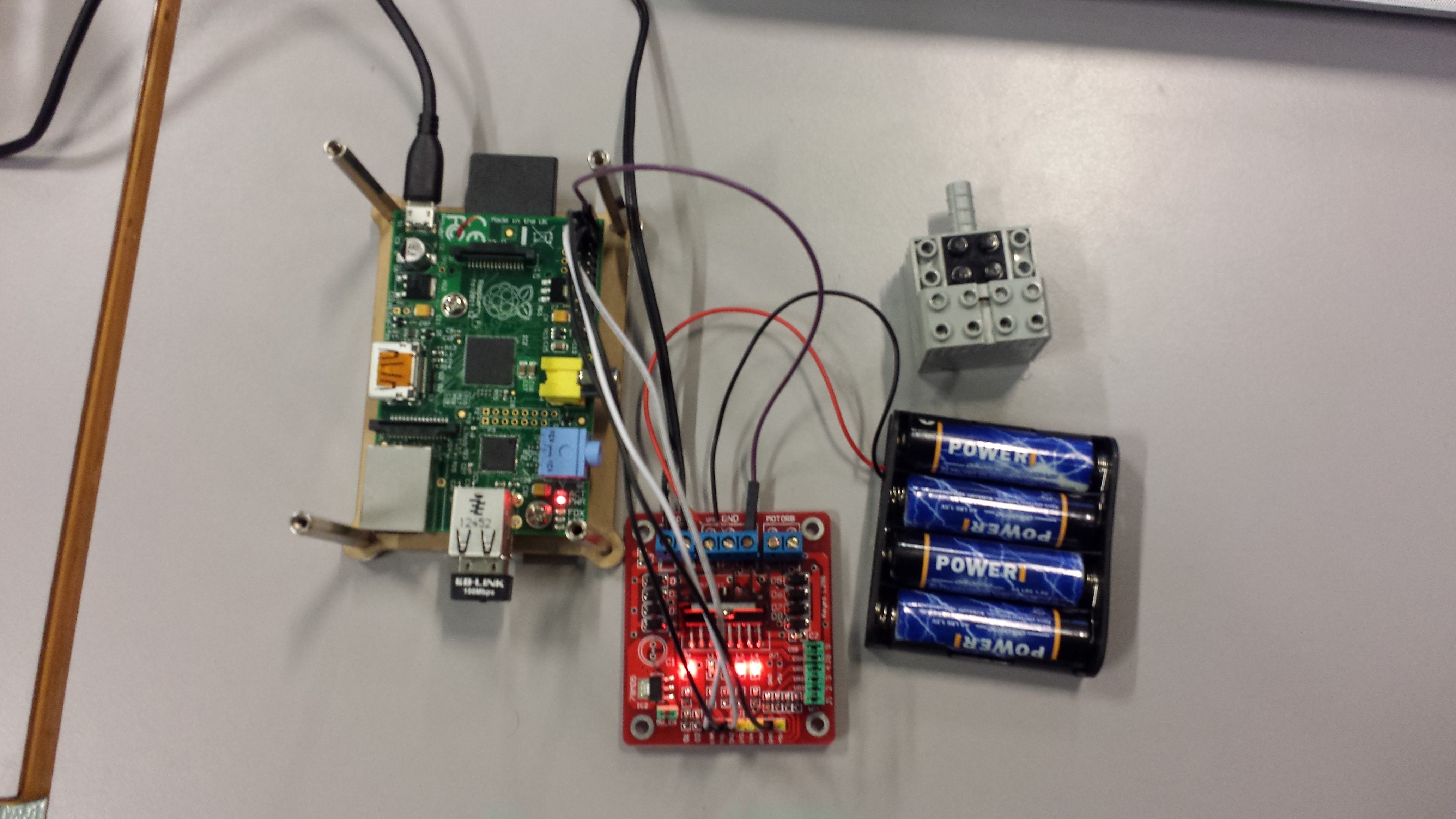
Dagen begynte med at vi satte oss inn i hvordan vi skulle ta i bruk skolens motorskjold. De kalles Keyes L298 motorskjold. Disse har da ikke de samme inngangene som vi har på BrickPi’en, slik at vi blir nødt til å klippe og avisolere ledningene til motorene. På bildet ser vi et motorskjold koblet opp til Raspberry Pi’en og et batteri, for å teste motoren som ligger ved siden av.
For å kunne ta i bruk et slikt motorskjold, må man i tillegg kunne bruke GPIO pinnene på Raspberry Pi’en. Vi måtte derfor også finne ut hvordan vi fikk tilgang til å bruke disse pinnene. Med det, så måtte vi også sette oss inn i puls-bredde modulasjon av Lego motorene våre. Dette var for å prøve å unngå at motorene skulle gi ut like mye ampere under stalling. I tillegg førte det til at vi enklere kunne styre hvor fort vi ønsket at motorene skulle gå.
Videre blir det å koble opp alt slik vi hadde det tidligere, og teste at motorskjoldene klarer å kjørte alt samtidig.
Vi snakkes! 🙂