Hei igjen!
Vi mottok skjoldet den 27., slik at den 28. satte vi oss ned for å få alt opp og gå.
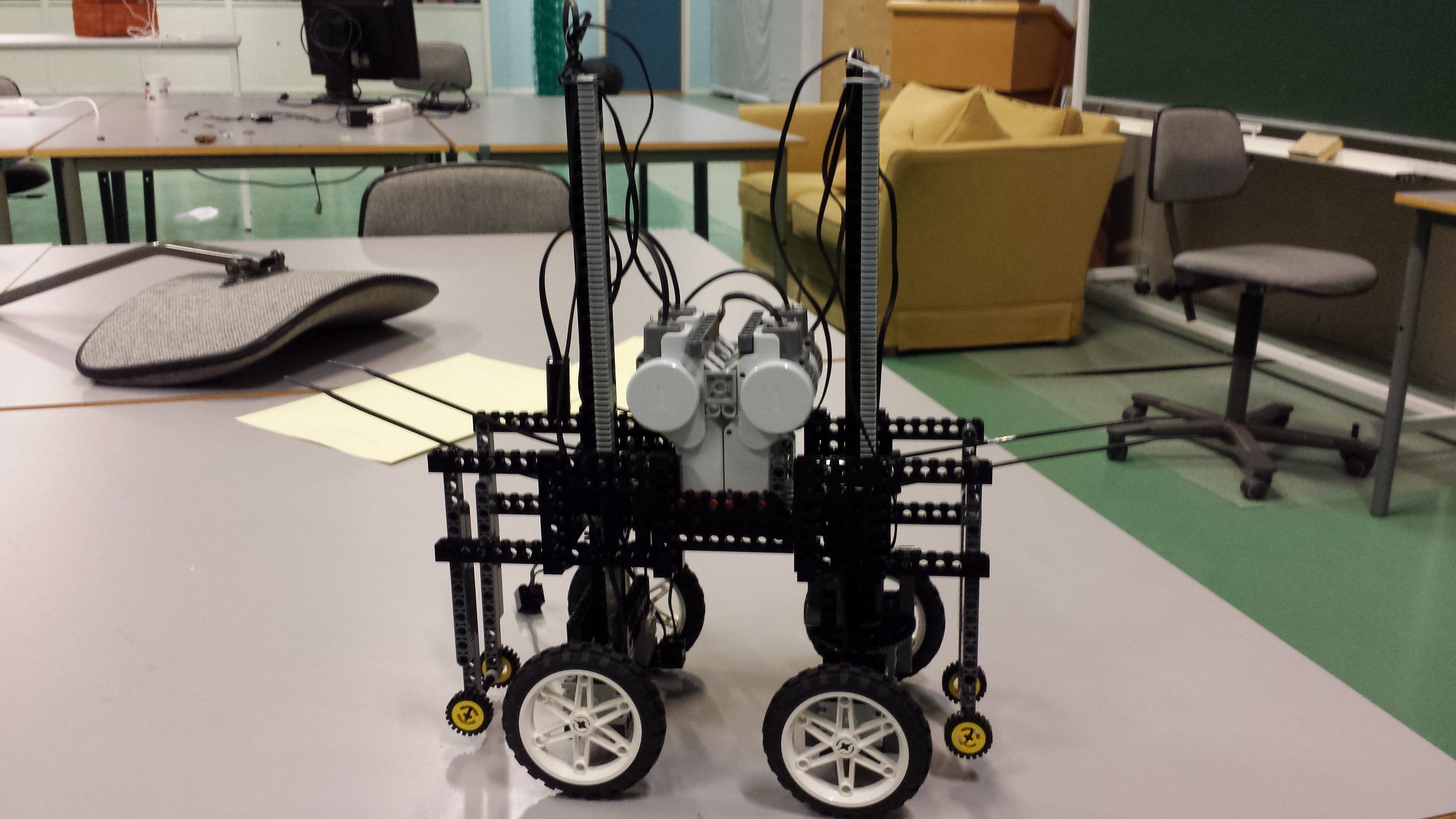
Vi startet dagen med å fokusere på Gstreamer, for å få til kamera strømmen. Mens Raspberry Pi’en sto og installerte, bygde vi om på roboten, for å forsterke den. Dette var da for å gjøre heisingen/senkingen enklere og med mindre hakking. Støttehjulene ble også festet og styrket, slik at trappeutfordringene skulle løses. På bildet under ser man hvordan vi har bygget opp roboten. Ledninger til heising/senking festet vi enkelt med noen strips på toppen, for enkelhetens skyld. 🙂
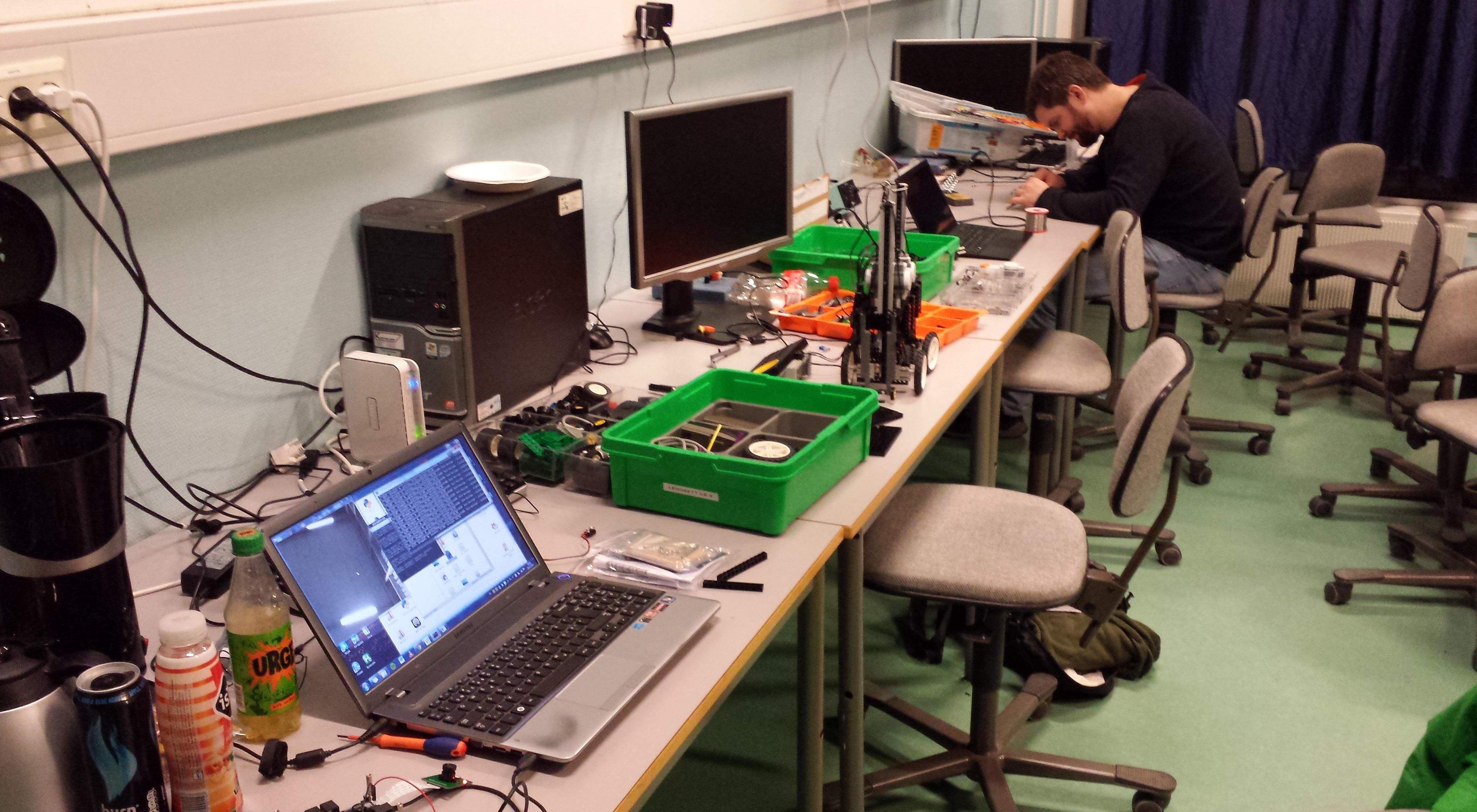
Da vi var fornøyde med oppbyggingen, gikk vi over til å koble roboten til Raspberry Pi’en, og da med det nye BrickPi skjoldet. Vi koblet alt opp slik at vi kunne få til både kjøring og heising/senking, trådløst. Uken før hadde endelig spenningsregulatoren vår ankommet, slik at ved litt lodding, kunne vi koble vårt 11,1 volt batteri til Raspberry Pi’en som bare tåler 3,3 volt. På bildet under ser vi gruppa jobber med både lodding og installering av kamera!
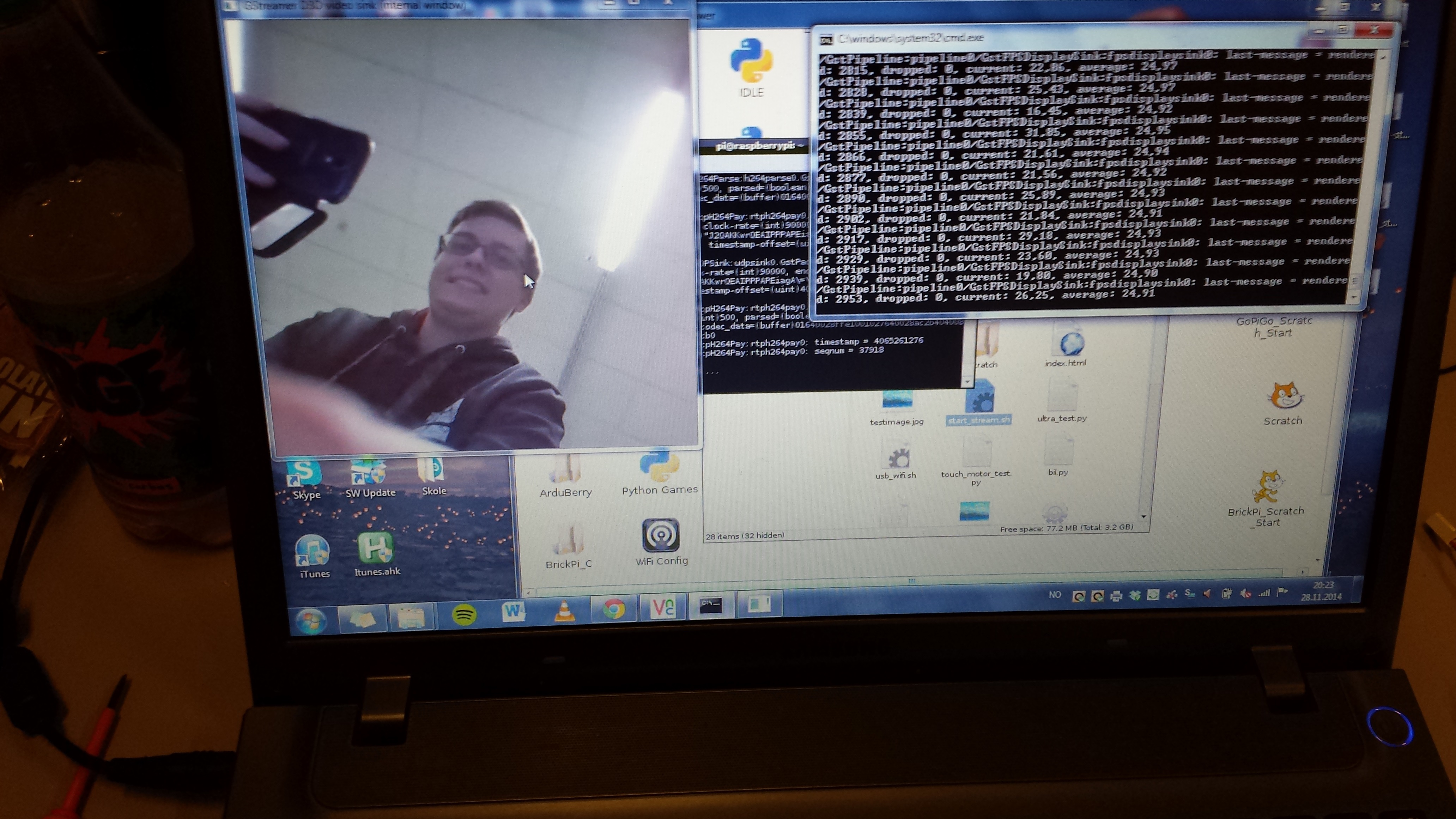
Etterhvert som både oppbygning og oppkobling var gjennomført, gikk vi over for å fikse kamera strømming og Gstreamer problemene. Med litt feilsøking og googling, greide vi endelig å finne ut av kamera problemene. Vi klarte da å starte en “pipeline” via Gstreamer, som sender videofeeden til en mottaker på Windows. Bildet under viser at “pipelinen” og kameraet strømmer direkte fra kameraet.
Tilslutt koblet vi alt slik at det fungerte trådløst via Wi-Fi, og feste både Brick Pi og batteriet på roboten. Deretter testet vi alt kjørende samtidig, og alt fungerte relativt greit uten store problemer! 🙂 Det var litt hakking ved heising og senking, men den trådløse kjøringen og kameraet fungerte akkurat som det skulle. En person styrte alt fra en ende av dronesonen, mens roboten var i andre enden.
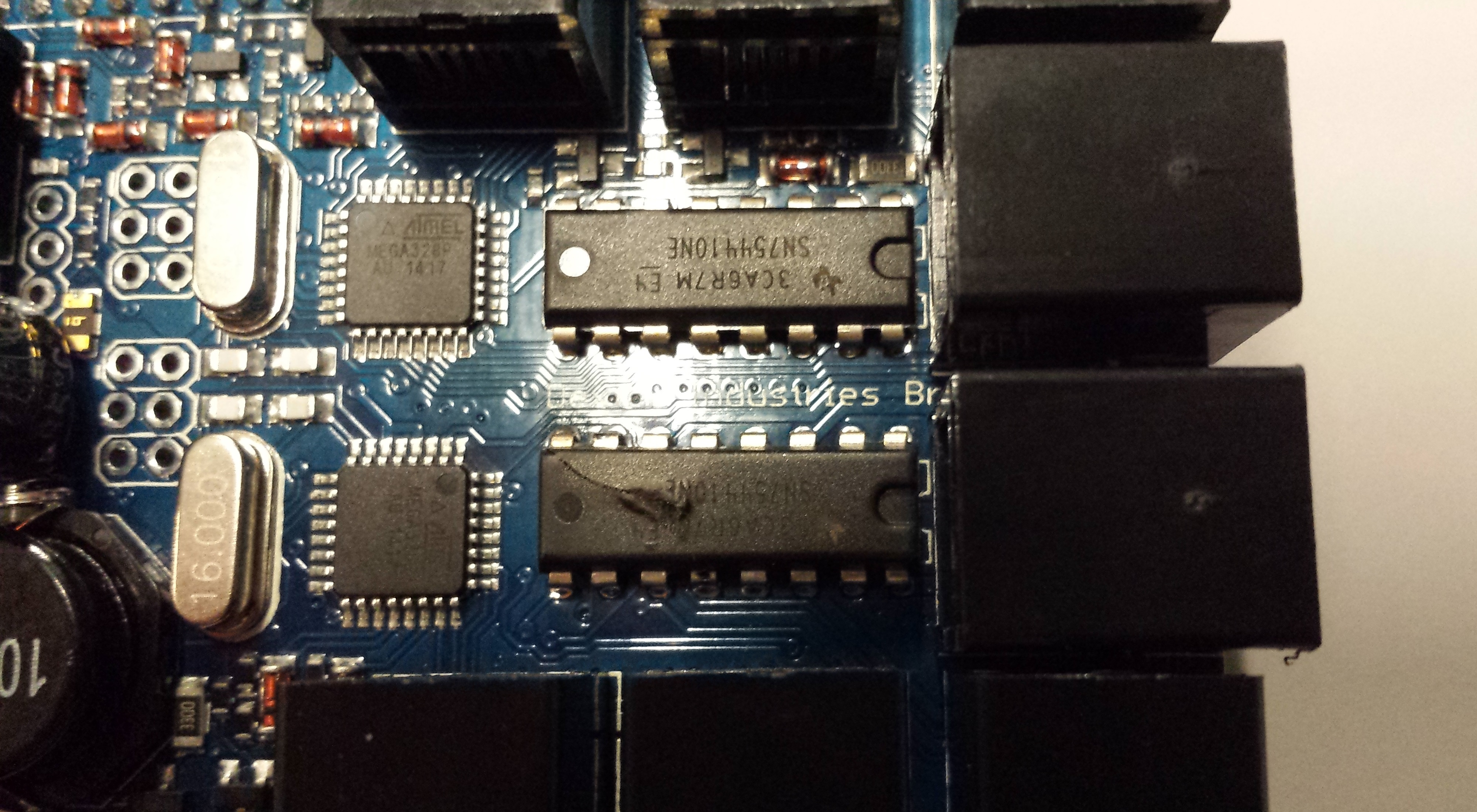
Men etter en liten stund, mens vi kjørte litt rundt, så sa det “puff” og det kom røyk. BrickPi skjoldet ble ødelagt igjen. På bildet under ser man tydelig, på den nederste brikken, hvor det har gått galt på BrickPi’en.
Vi bestemte oss derfor for å prøve med skolens motorskjold på mandag, og se om det var mulig å få ting tilbake til der de var. Med utslitte hoder dro vi skuffende hjem uten robot eller BrickPi skjold.
Vi snakkes! 🙂