Hei!
Prosjektet vårt har hatt stor fremgang den siste perioden! Brikkene begynner å falle på plass. (hehe)
Først og fremst så har vi fått Pi’en i gang. Den kjører nå med skjerm, tastatur og mus, uten noen problemer.
Vi har kjørt i gang ulike tester med forskjellige Lego Mindstorms motorer og sensorer. Der har vi funnet to motorer som vi mener passer veldig bra til vår robot. Den hvite, som vi ser på det første bildet under, har mye torque. Vi tenker å bruke denne til å heise/senke roboten. På bildet under, har vi en motor med mindre torque, men med høy RPM. Denne tenker vi å bruke til å kjøre med roboten.


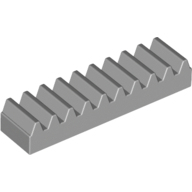
Når det gjelder Lego roboten, så har vi funnet ut at vi trenger å bestille en bit fra Lego sine nettsider. Gear rack brick (4211450), en type tannstag, som vist på bildet under må vi bestille flere av.
I tillegg til å ha satt opp Pi og fått robot bygging i gang, så har vi sett en del på sensorer. Vi er litt usikre på hvilke sensorer vi ønsker å ta i bruk, men fokuset har ligget på å ta i bruk IR-sensorer til å måle avstand til trapper. Til tracking av personer, så diskuteres det om vi kan ta i bruk IR-transmitter og -reciever, eller om ultrasonisk tracking vil fungere for oss.
Det som står på agendaen blir å fikse Wi-Fi på Pi’en, slik at vi kan kjøre den uten å måtte koble til skjerm, tastatur og mus. I tillegg må vi finne ut hvor mange Lego brikker som må bestilles og eventuelt hvilke sensorer vi blir nødt til å få tak i.
Vi snakkes!