Hei!
Vi ønsker deg hjertelig velkommen til vår blogg, Robothund.
Gjennom semesteret kommer denne bloggen til å følge prosessen i vårt prosjekt, Robothund.
Gruppen vår består av følgende medlemmer:
– Kristian Dønheim Kvam (Elektro)
– Magnus Røyter Finnesand (Data)
– Anders Godstad (Elektro)
Prosjektet vårt går ut på å lage en Lego robot, som kan:
– Styres over Wi-Fi
– Klate i trapper (Både oppover og nedover)
– Kjøre over dørstokker
– Tracke og følge etter en person rundt på skolen.
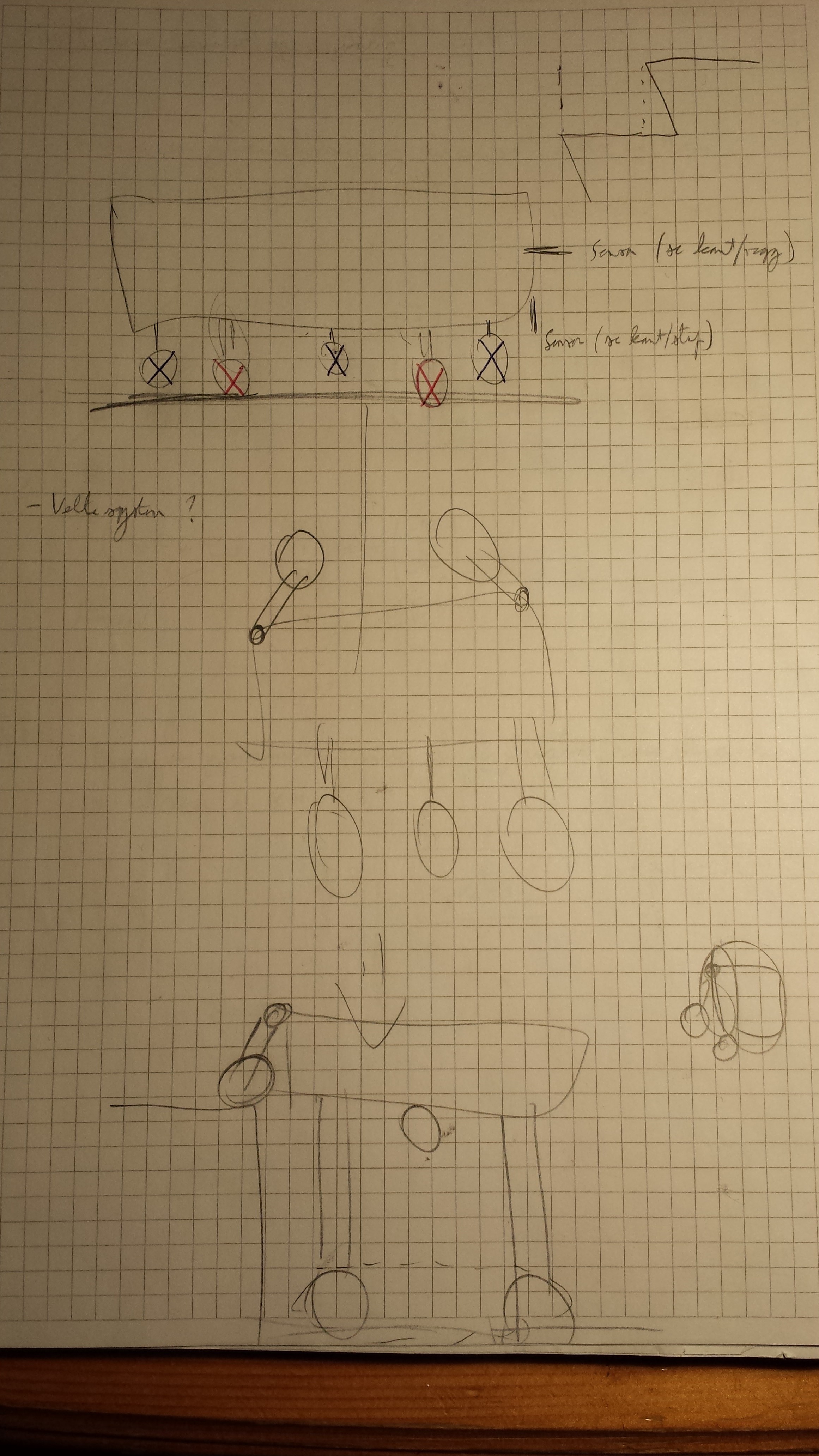
I bildet ser vi konsept tegningen vår, som viser enkelt hvordan vi har tenkt å bygge roboten. På den øverste figuren ser vi en figur med ulike farger på hjulene. Hjulene som har røde kryss skal kunne heises og senkes, slik at roboten skal kunne klatre i trappene. De blå hjulene skal være støttehjul som den skal kunne lene seg på under heising og senking av de røde hjulene. De andre figurene er ulike konsepter på støttehjul plasseringen.
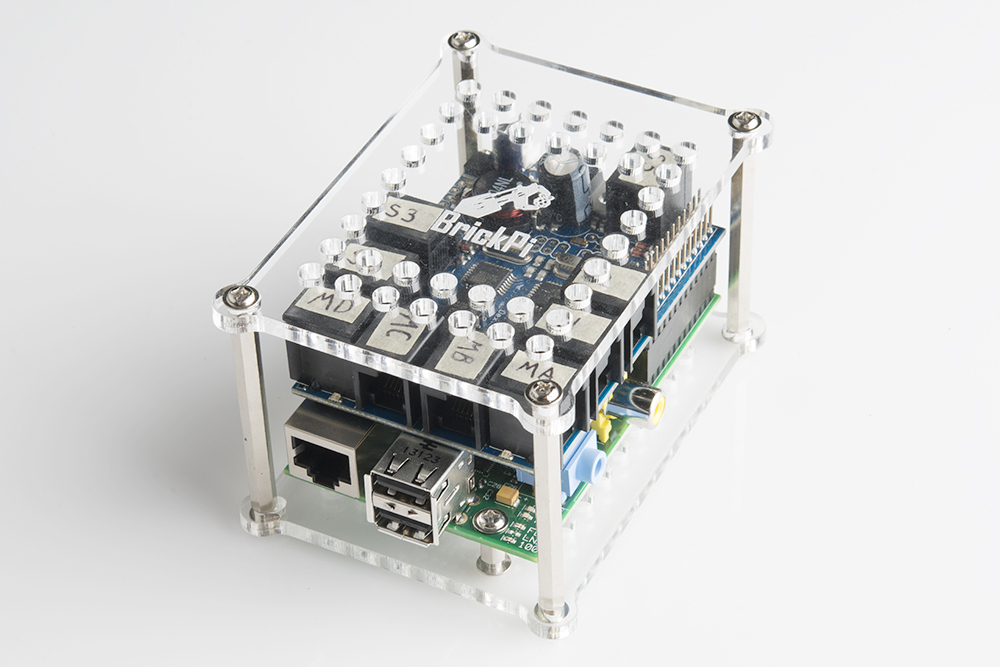
Vi planlegger i all hovedsak å ta i bruk Dronesonens BrickPi til denne oppgaven. BrickPi’en består av en Raspberry Pi med et motorskjold på toppen med innganger til Lego Mindstorms motorer og sensorer. Det er da dette unike skjoldet som kalles BrickPi, som er et ekstra tillegg til Raspberry Pi, for å enkelt kunne programmere ulikt Lego tilbehør. Tilsammen har dette skjoldet åtte innganger, fire til motorer og fire til sensorer. Lego Mindstorms er et mer avansert Lego byggesett, som inneholder ulike motorer og sensorer. Dersom vi ønsker det, kan vi da i teorien koble sammen fire Lego motorer og fire sensorer.
Raspberry Pi’en tar i bruk både C++ og Python, slik at vi kan velge selv hvilket programmeringsspråk vi ønsker å ta i bruk. Dersom det blir nødvendig, så må vi også ta i bruk en Arduino.
Det første målet vårt er å installerer og starte opp Raspberry Pi’en, samtidig som noen av oss jobber videre med konstruksjon av roboten og ulike sensorer som kan være nødvendig å ta i bruk. Deretter må vi fokusere på å få Wi-Fi på Pi’en slik at den kan kjøres uten skjerm og tastatur.
Vi snakkes! 🙂