this week works
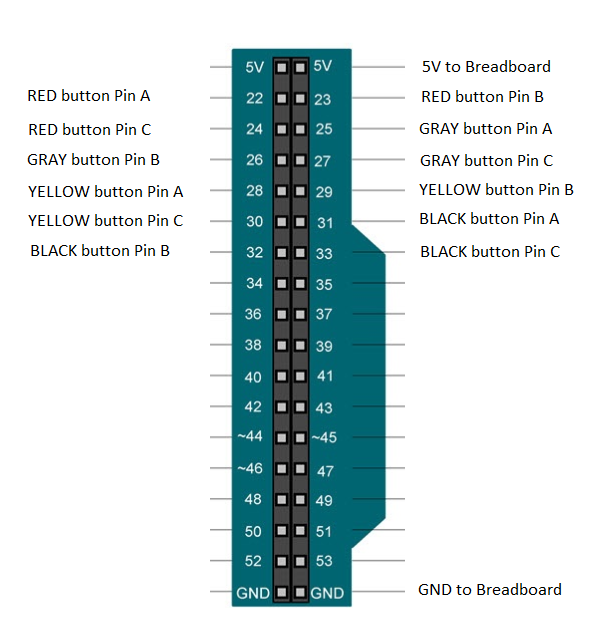
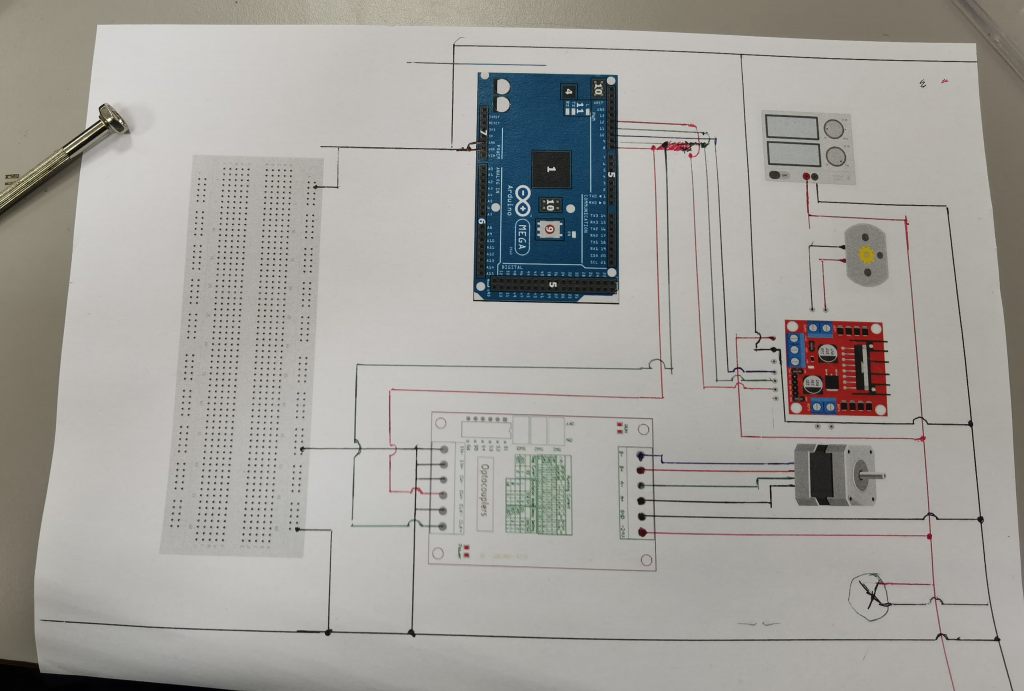
started working on connecting all the control unit to breadboard and then connect it all to Arduino, using VGA cable.




^- Mehdi
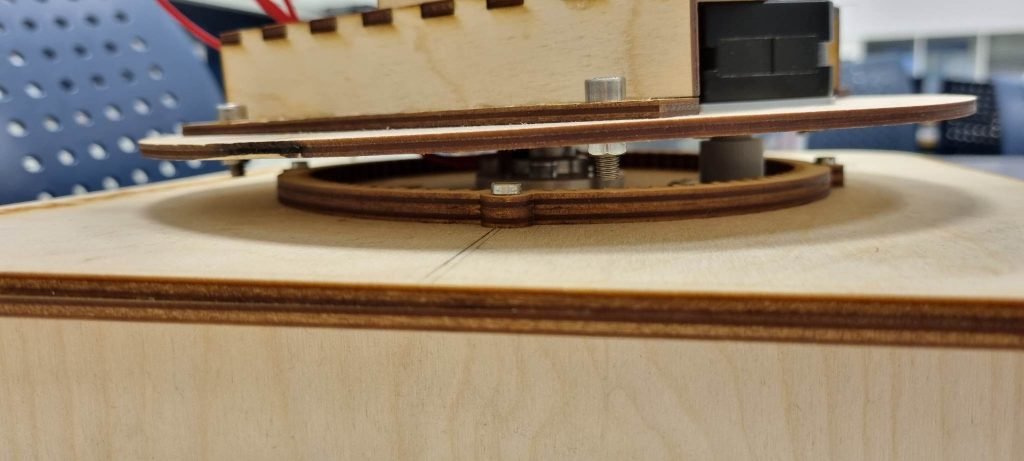
For solve the problem, we made a support and installed a total of three, one for each 120 degree angle.

It has a roller function, so it helps to rotate of circular plate. And it will reduces pinion gear stress.

Started to work on merging the codes related to the game logic and image recognition to have the game logic use the image recognition to know the cards in the card dispenser. Had troubles with using the raspberry pi program we made to take pictures as we were getting “out of resources” errors. Fixed it by rewriting some of the code so that the camera is only initialized once. We want there to be a variable in the image recognition program that keeps count of how many cards has been dispensed so that we can adjust the camera based on how many cards are in the dispenser. Since the image recognition program is reset each time, we need to keep the variable throughout all the programs to keep the value. We also wrote some of the code incorrectly because we misunderstood how one of the the black jack rules works. – Nikolai & Andreas
Me (Martin) and Lord started working on optimizing the arduino code for the motors. We made the code more compact and clean. After that we started working on making the code for the merge. That includes a lot of new functions, classes and logic. We will continue working on the merging code for the whole week and hopefully get it working.
Here is a video of our system. A better video is on the way. It will be posted really soon!