Computer engineers
Finally we are beginning to see the system working together on our last iteration of the product. We have been analyzing some of the code with the library to check that the system works and it does. It does have some issues that we are going to look further into and that is that when we change distance the motor is supposed to go then it is it not as precise as before. We currently think that the issue lies in the stepper library. Below you can see picture which function we think is causing the problem. For some reason speed and distance have a correlation.

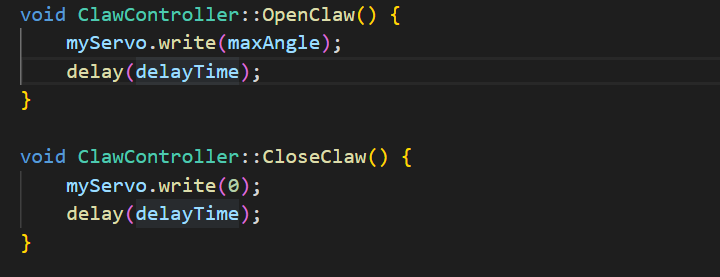
Furthermore we had some issues with the Servo.h library. Because when we used it together with LED screen at the begin we found that it did not work properly. Since it only behaved like that then LED screen was connected we suspected it had to do with how much voltage it received when the LED was connected. So therefore we thought that sending several electric pulses within a short amount of time would solve the problem. We knew that was a bad solution since it might be bad for servo motor to send several angles since that means we send several electrical pulses in a short amount of time. Now in this week we found that it actually worked without the for loop the library and it went much more smooth aswell. We suspect there might have been something wrong with the servo motor we used before. Below is a picture of how we implemented the code for now.
Raspberry PI
We continued the development on the Raspberry PI. After a few weeks of problems with making the serial interface work together with the Arduino, we finally got the GUI system on the Raspberry PI to communicate with the serial script and in turn the Arduino.
Mechanical Engineers
Ole Markus and I are having a little fun these days. We are seeing an end to the project. Its up to the computer and electro engineer to solve the remaining function of the system, the mechanical aspect is okay and ready to roll. Based on numereous test and prototype before the finished modell we now just focus on design and aesthetic. Down below are just pictures that where taken this week in our project.

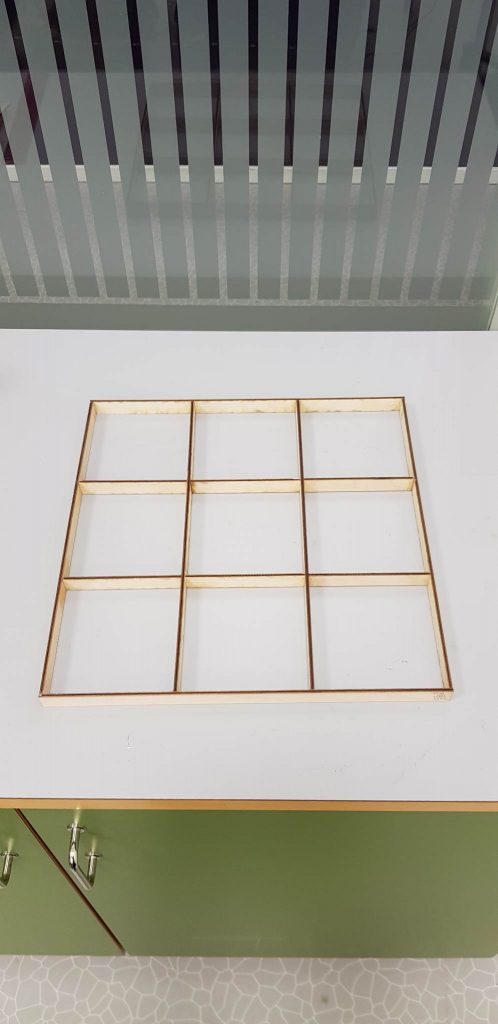

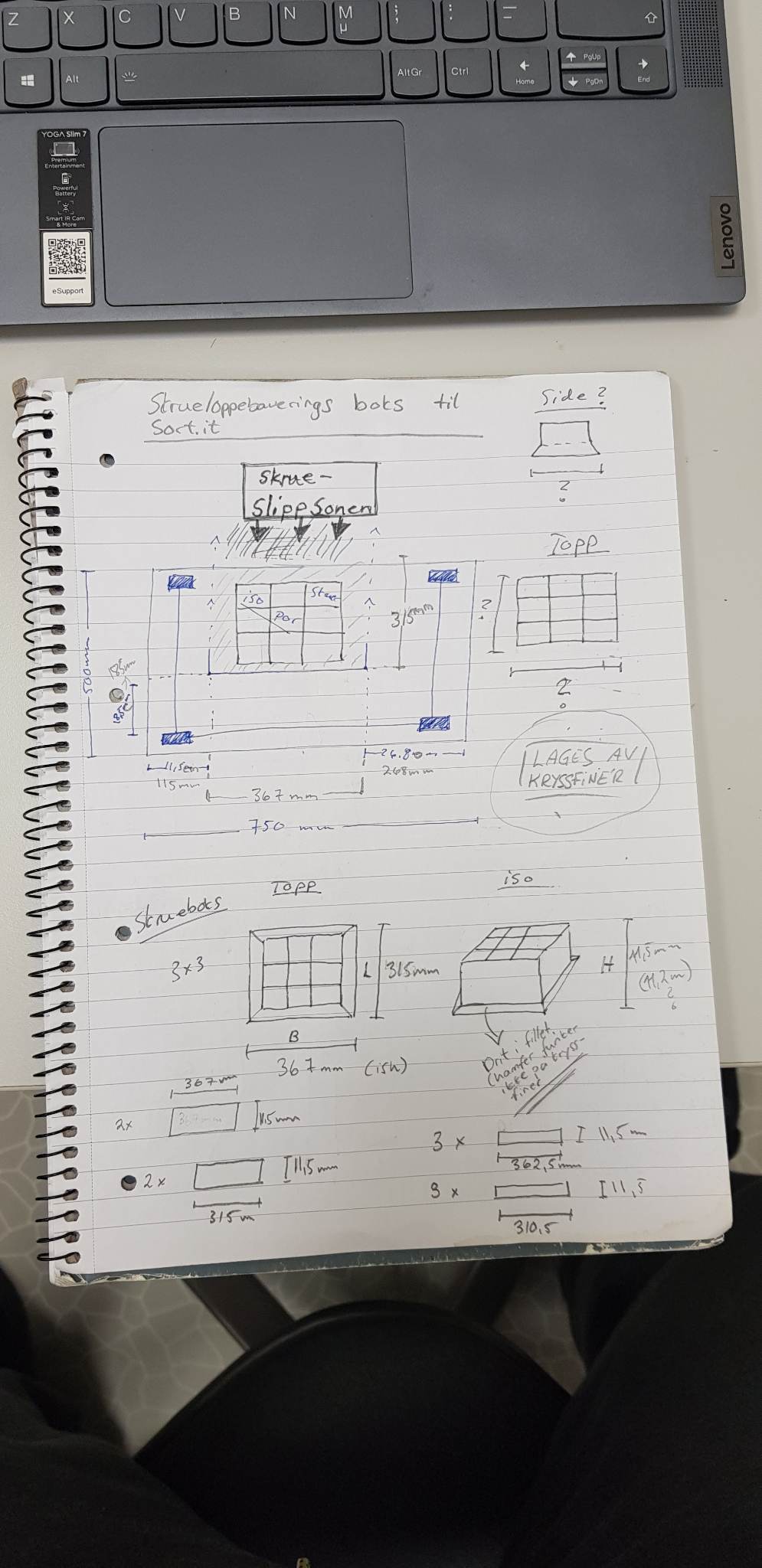
Quick and simple work-drawing/sketch
https://clipchamp.com/watch/hr9cFLtcyDl
Over the text you can see a link that show the entire system working together. All mechanical parts.
– Kim & Ole
Electronics
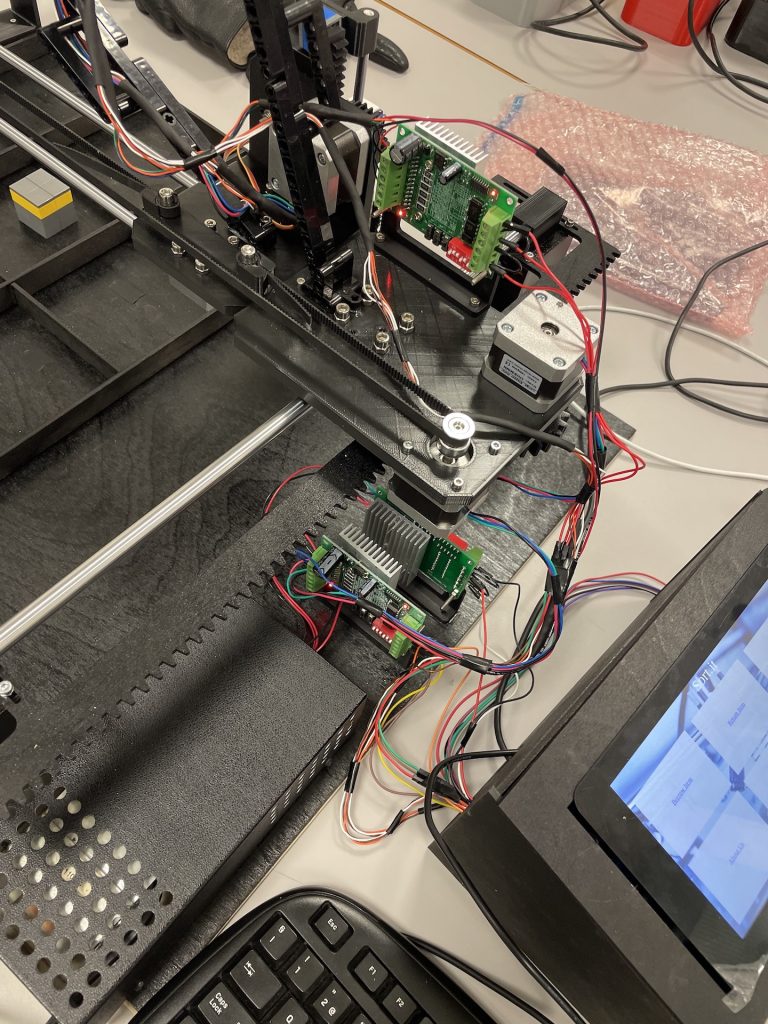
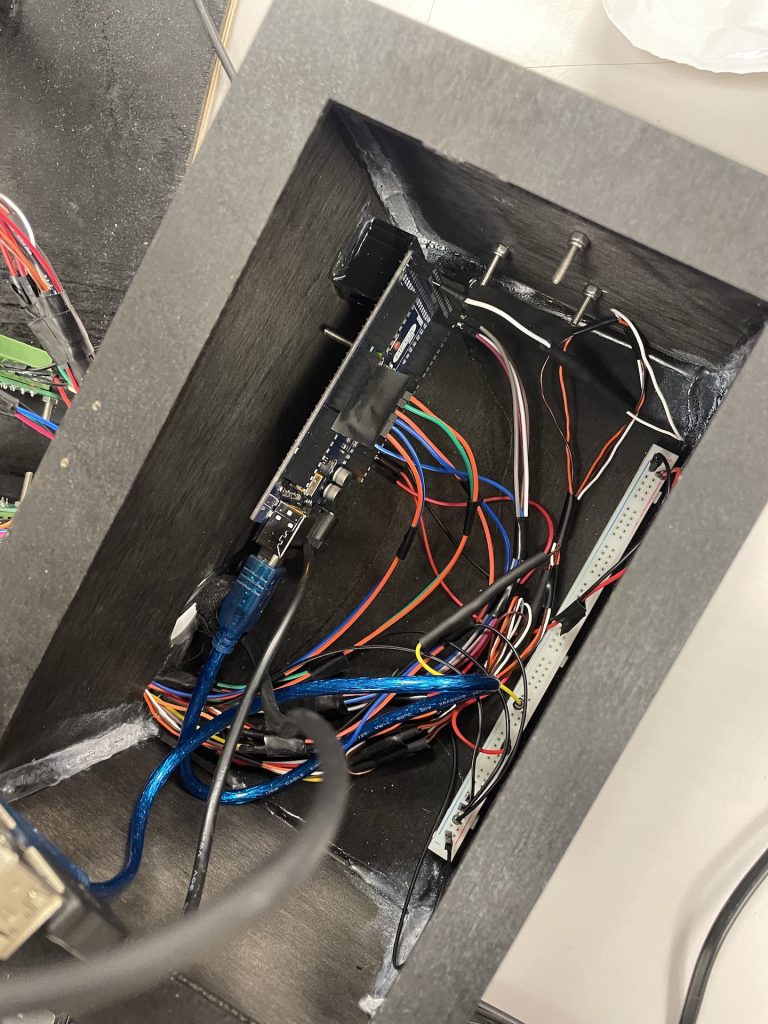
This week I continued wiring up the system. As many of the wires we had were too short, I had to do some soldering to make them long enough. However, because of the lack of wires for the Arduino, there is a mixture of colors throughout the system. We have also decided to add an RFID reader to the system to make it more secure from unauthorized usage. I have now added this to the wiring diagram as well. Another change we have made is that we are no longer using any buttons. We are only using the touch screen with the Raspberry Pi to control the system.
Now that I am done wiring up the system, I could begin applying cable socks to make the wiring more sturdy and look more professional. Sadly, we figured that we should try lifting the cables above rail-system after I had already wired everything, so I had to do some splicing by soldering some more to make the wires long enough. I was also a bit worried that the wires we have been given were too thin for the stepper motors, but that was no problem.
– Mathias