Hei bloggen!
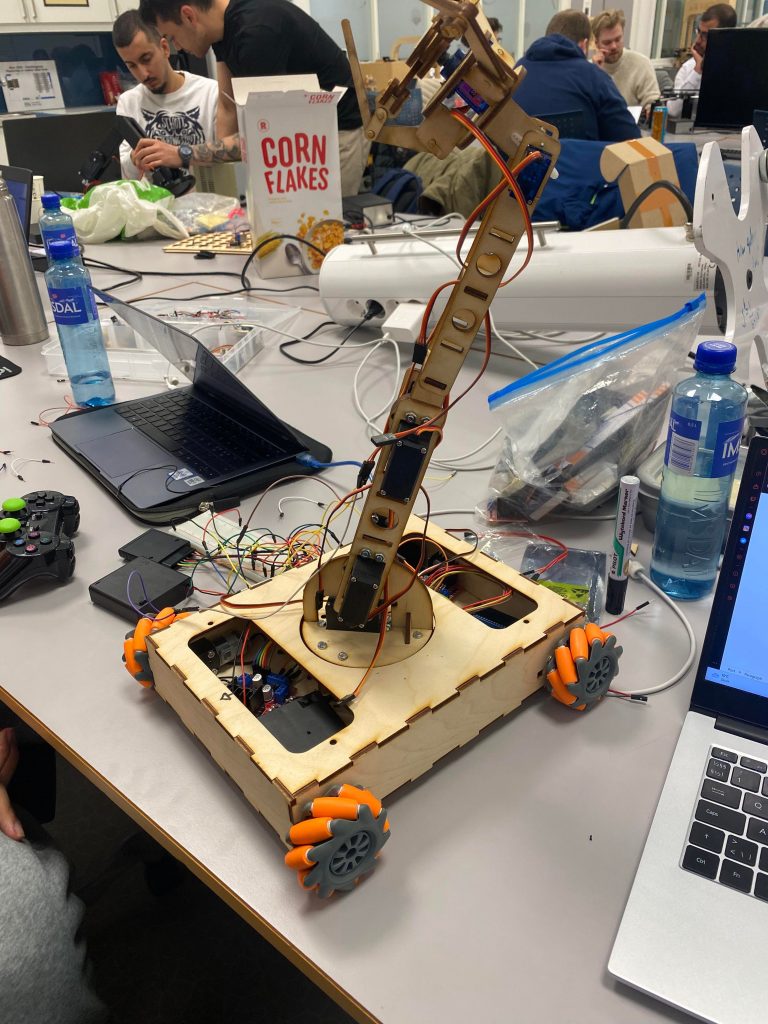
We have discussed about making the arm in plastic with 3D printing. This is because with the material we have today the joints are a little shaky and when the arm stand upwards they are bending towards the sides. We also believe that with plastic the arm will be more steady than with plywood.
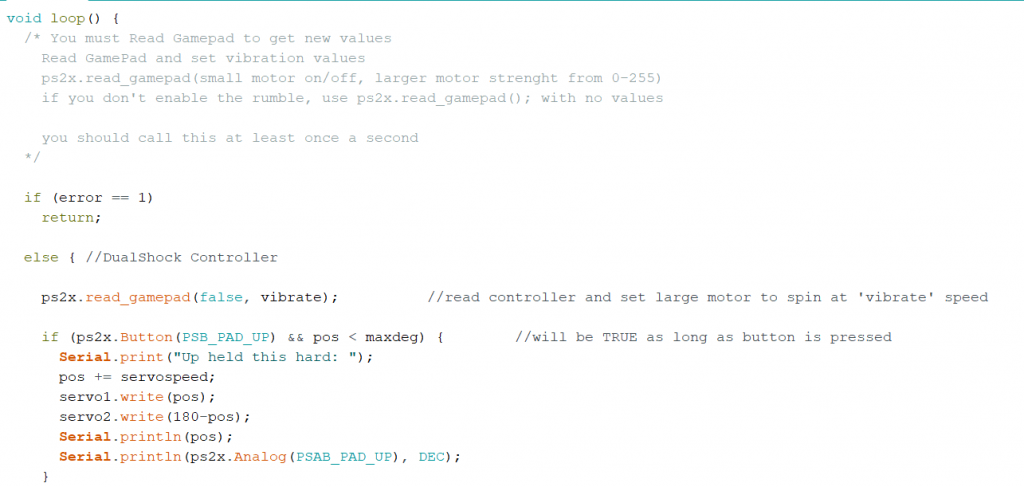
We continued working with the problems with the servos from last week. We found a solution for when the servos are rotating by itself. That solution is to detach the servos when there is nothing happening, and when moving the controllers it’s attaching the servos again so we can steer it as we want.
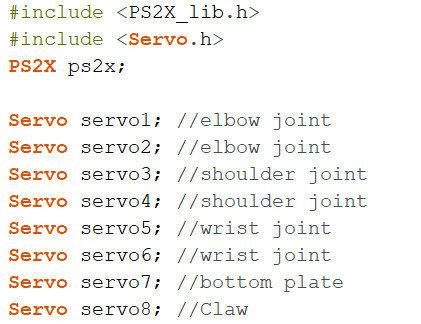
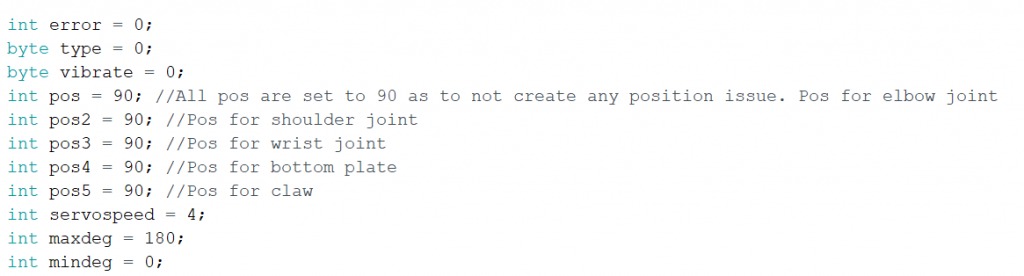
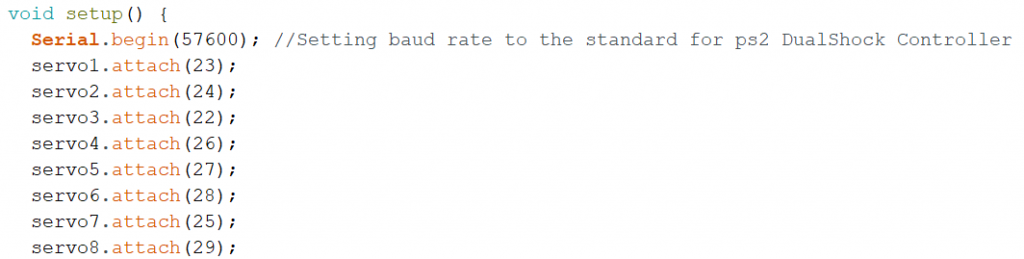
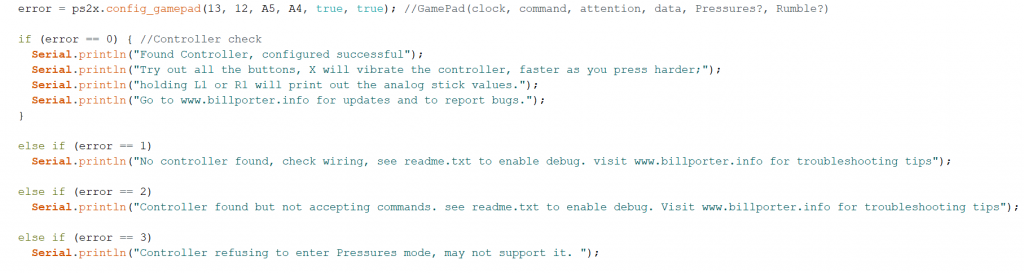
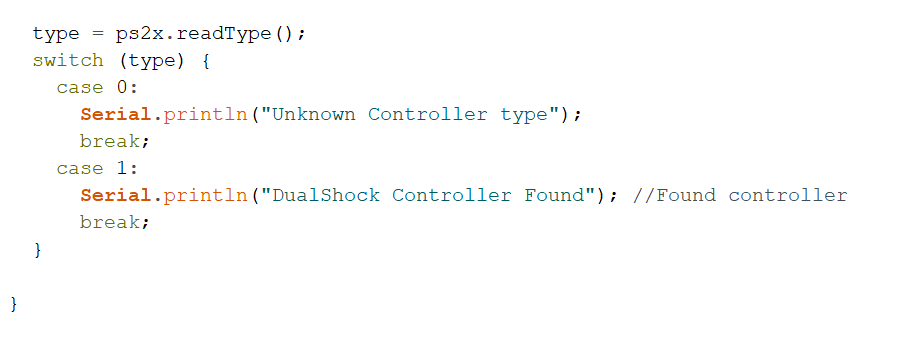
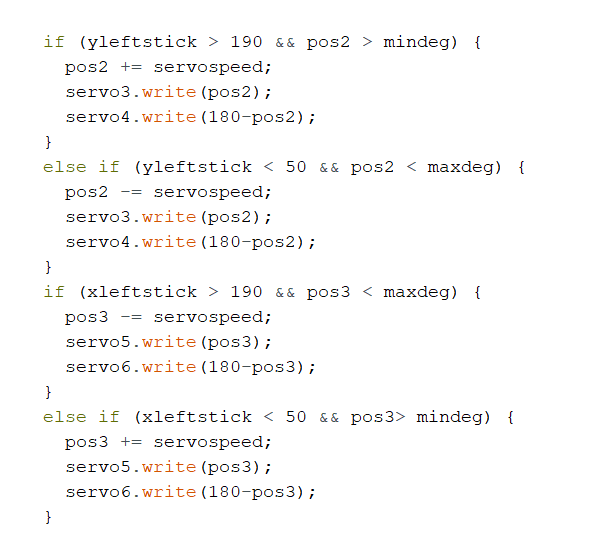
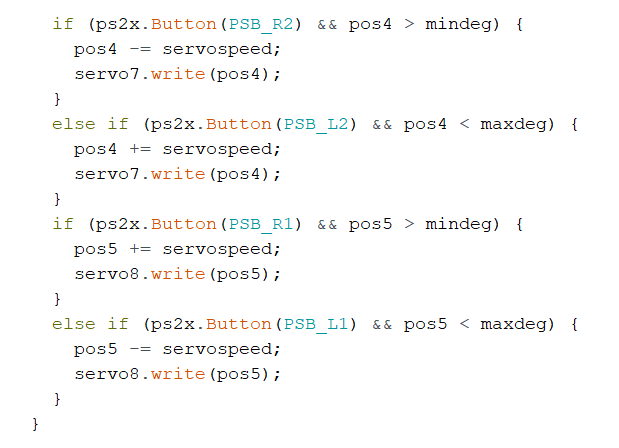
We also made the code for the servos on the robot arm and for the controller aswell.