02.11.2022
This week we made a lot of progress. As we saw in the last post, we had a lot of the components ready, including the game controllers, card dispenser, DVI base and the raspberry pi light. Last time, we concluded that we needed the card dispenser at an angle for the DC motor to shoot out only one card. Sunny did the model, laser cutting and the assembly required for this task.
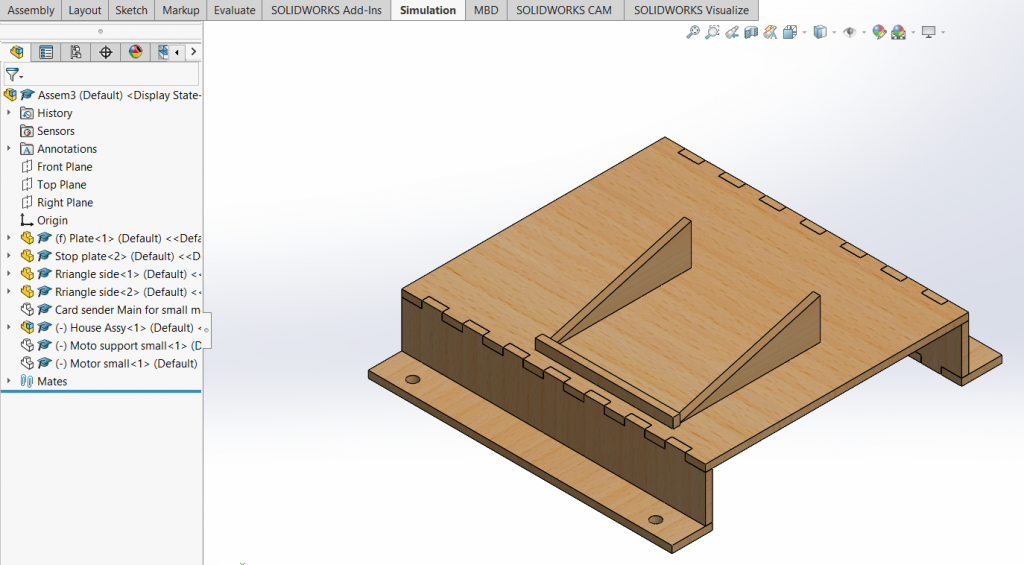
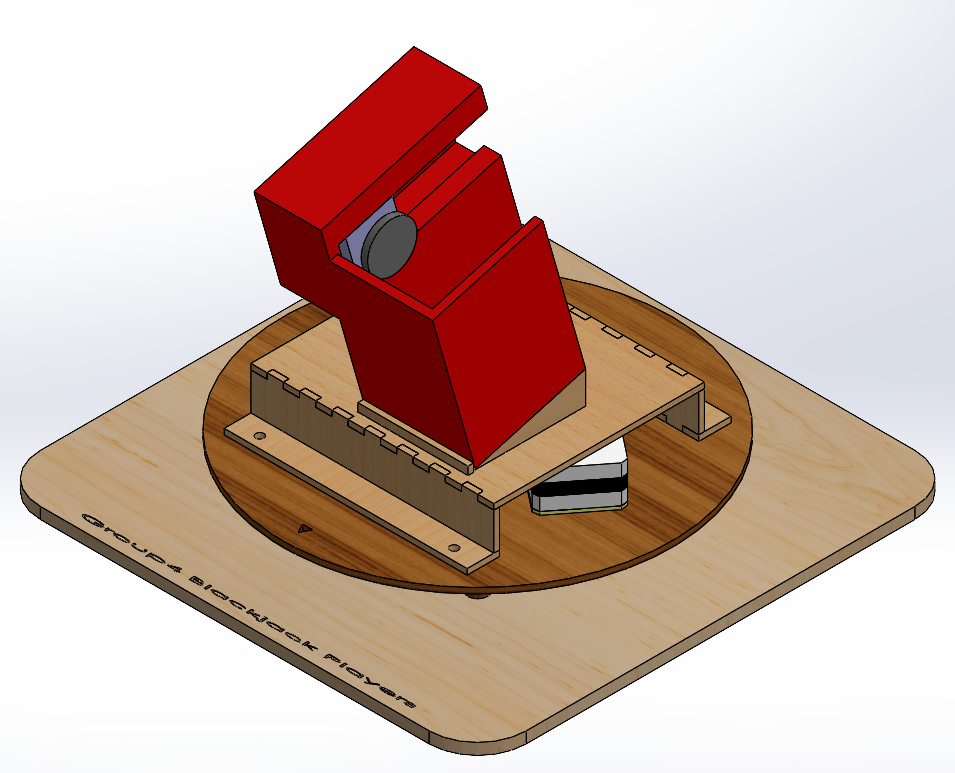
This is the result. Then we had to test again if our system will work, if the angle is right, if the pressure is right, and how the motor will behave. After some testing for a while, we found out that the system is working as expected with about 95% success rate. The other 5 % , the motor would shoot out 2 card or it would get stuck on a card. However the system had to be tested with both motors. A new solutions was needed as we thought the amps required from the stepper will fry the DC motor. We tried some solutions like connecting the DC motor to a 9v battery together with a 3.3v on the arduino, connecting a 9v battery with two 1.5v battery. This way the DC motor will be running separately from the stepper. The stepper motor needs about 2.5 amps to run. We thought that it would be problematic to run them on the same power supply. However, the teachers told us that as long as both motors are running on the same voltage the amps would not have any effect on the system. After some testing, everything seems to work fine, except that the DC motor didn’t shoot out the cards as far as before. The only thing left is the cable management.
Meanwhile, Mehdi was working on soldiering the cables for the buttons and LCD screens on the game controllers. After that, he fixed the whole cable management for our system, as we were using breadboard jumper wires for everything, which are not good or long enough for our system.
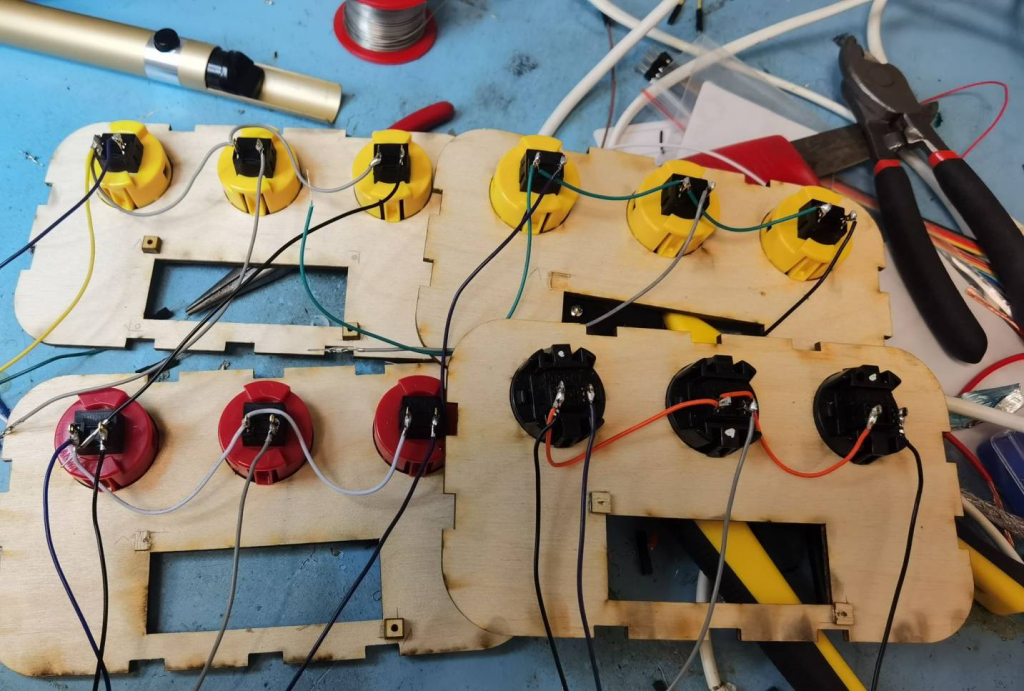
Lord and Mehdi teamed up on assembling everything together. At the end, they managed to hide all component and cables. They made it so that we need only a USB for the arduino and only one power connection for both motors. They fixed a light for the card recognition as well.
This is the final result of Lord and Mehdi’s work. Our system is put together nice and clean. We made a huge progress this week.
Our card recognition team, Nikolai and Andreas worked on some other problems. The card recognition program is made so it zooms in on a certain part of the card which is then compared and recognized. However when a certain number of cards has been send out, the original zoom is not working. They worked on finding out and adjusting the zoom based on how many cards are left in the box. This is needed as the cards are differently placed in the box as they are further away, more zoom is required to get the same view as from the start. Not only that, but the contour detection of the image recognition program had to be changed as well. The same way as the zoom, the contour detection had to be changed so it finds the right contour consistently when the are less cards with every use of the program.
This post was written by Martin Bozhkov.