Hei bloggen!
We continued working on putting it all together. We do experiencing some issues when wanting to control everything in with the controller. Some of those problems are that when moving the servos, they sometimes live there own lives, and move when noone is touching anything. We will work on finding solutions to this. The servos on the same joint are sometimes working against eachother, which means we they wont move in the direction we wants.
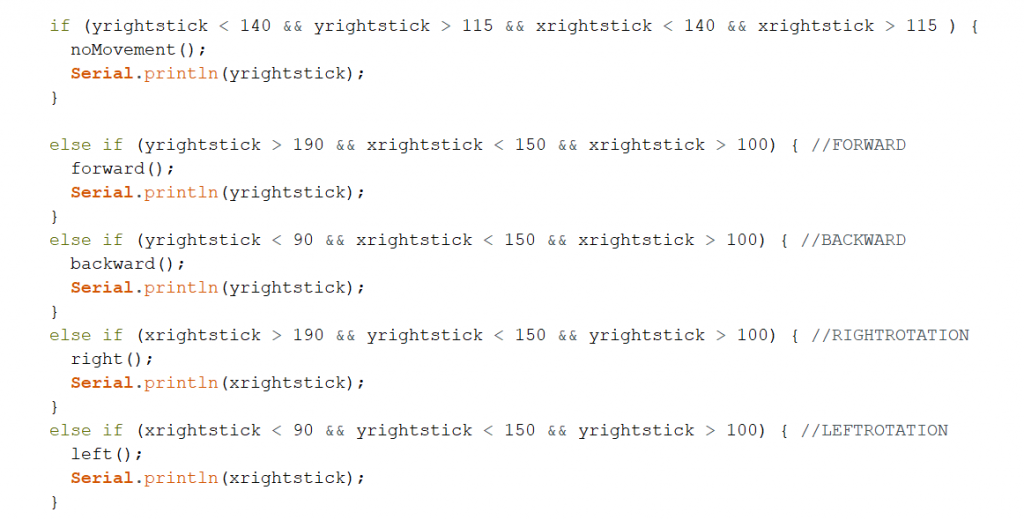
We made the code for when pressing certain buttons on the controller it will move in different directions.
We also made the walls on the car higher so the components will fit inside it. The previous walls were too short so that the motor driver were higher than the walls.
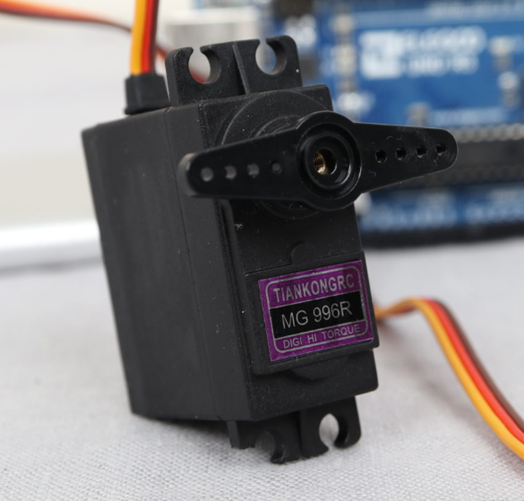
MG996R servo motor:
Operating voltage: 4,8 – 6,6 V
Operating current: 600 – 1500 mA.
Angle: 0 – 180°
It seems that the SG90 servo does not have the torque force to operate the «claw». It gets warm as soon as we try to operate it.
To run the servo motors on the arm, we need an external power supply (not to crash the arduino board- because of to much current)
We have tested the arm without having the arduino connected to a computer, and it seems to work ok.
It is also crucial to have common ground for the components on the arm and the power supply. The servo motors and the arduino is now driven by a power bank with 4 * 1,5 V AA batteries which each delivers 2100 mAh.
Each pin on a arduino Mega draws 40 mA. So we have to measure the operating current when the components are assembled (finding out how the load affects the current used).
L298N Motor Driver
The heart of the motor driver is a H-bridge driver chip that can handle current up to 2A per channel. A H-bridge is an electronic circuit that switches the polarity of a voltage applied to a load to control the rotating direction. The motor is a high power motor driver module used for driving DC and stepper motors.
As stated, the dual H-bridge allows us to swich the direction of the current, which means we can make the motor spin in both directions. With the PWM (pulse width modulation) you can use the arduino to make it spin at any speed. We are using the L298N motor driver on our mobile platform.

4 * 1,5 V AA batteries which each delivers 2100 mAh.