Hei bloggen!
This week we had our computer engineers starting programming the car and the arm. Since we have gotten the controller we are going to use, we can finally start to actually program the car and the arm to be able to steer it from the wireless connection. Now we just need to get everything to work together so that will be the next step. We will also need to do cable managment with the wires that is from the arm. We also need to see with the arm inside the car that there is enough space with all the other components, such like the battery pack, motor drivers and the arduino.
We have also made some code of the car to be able to move.
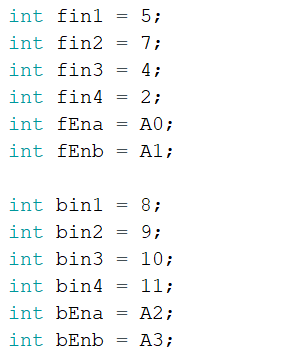
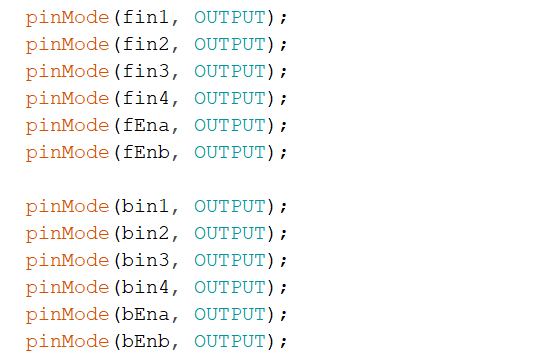
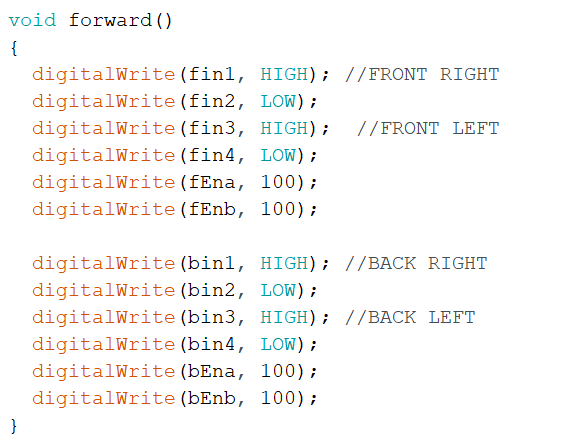
We made different function for the car to move in certain direction. This will make the car move forward, but we have also made the same functions for backwards, stop, left and right movements.
We are choosing to use a designated library for the playstation 2 controller we bought. This is a library that let us program the different buttons on the playstation 2 controller. The way we are connecting the controller to the arm is that there is a device in the ps2 kit that is connected to the arduino, and a bluetooth connection between the device and the controller.

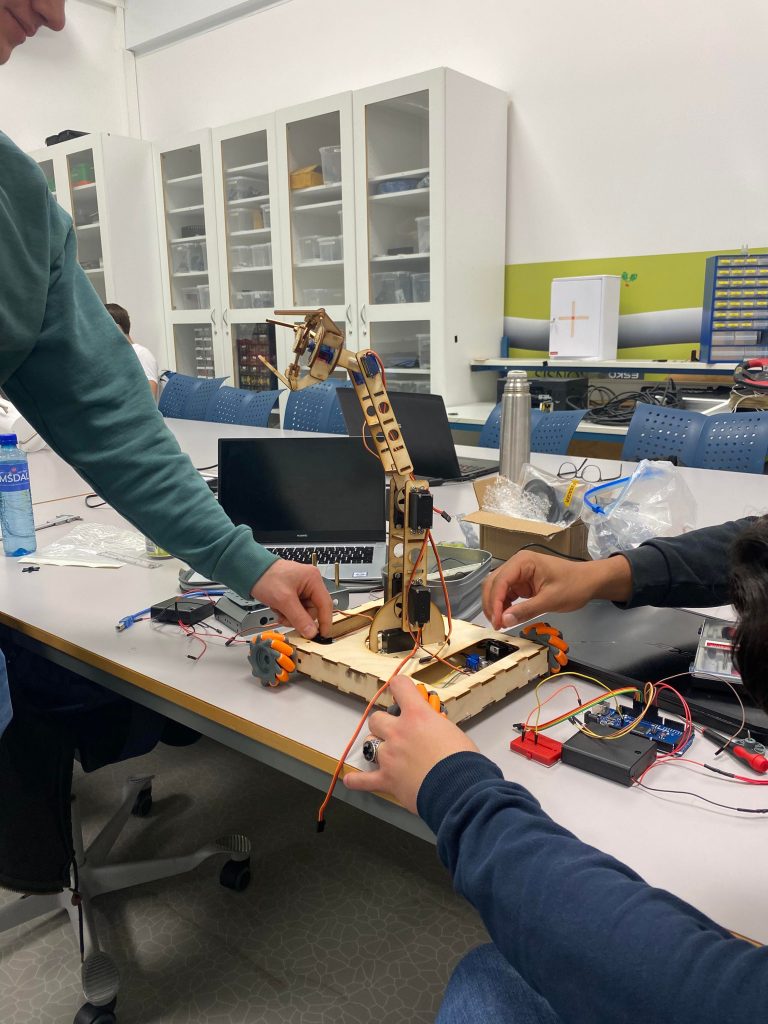
Here is a picture of the car and the arm mounted together and how it probably will look in the end.
One problem we have met when mounting this one is that the sides like the walls are too short for the components to fit inside it. So we have to put our mechanical engineer to try to make some new walls that are higher so the arduino and the motor drivers and the arduino can fit inside.
We will also need to work on finding how much power all the components need for it to working. At this time we do have two battery packs with contains 4 AA batteries. We hope this will be enough, but that’s what we need to find out.