Hei bloggen!
This week we got our parts for the arm that we needed so we got to finally assemble the arm. We also ordered the PlayStation 2 controller so next week we can hopefully start to connect that to control the arm.
We continued working with the car that is supposed to move around. We did research, tried and failed. We didn’t come any further with the ADA and the micro bit, so we took a decision that we switched to working with Arduino with it instead. This is because we have worked with Arduino before, and the arm is being programmed with Arduino as well. We also needed more space with all the components and the cables we are supposed to have on it. This is two battery packs, two driver motors and one Arduino. Also, on top of it we are going to have the arm on it, so we need quite a lot of space. This results in that our mechanical engineer created a new body to the car. This will be made to the next week, so we will provide picture then.
Mechanical
We got the servo engines for the arm, I assembled the arm and found some problems. The wood we are using are not completely straight and bends in different directions. because of this and that the servo arms have different heights when mounted alle the parts don’t fit perfectly. It is not a big problem and I will fix it with just some minor adjustments to some parts.
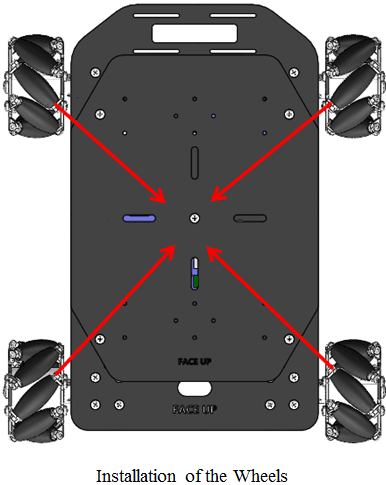
When I assemble the arm I found out I needed to change the placement of the wheels. I changed the location of one of the wheels so it will absorb more of the weight under lifting.
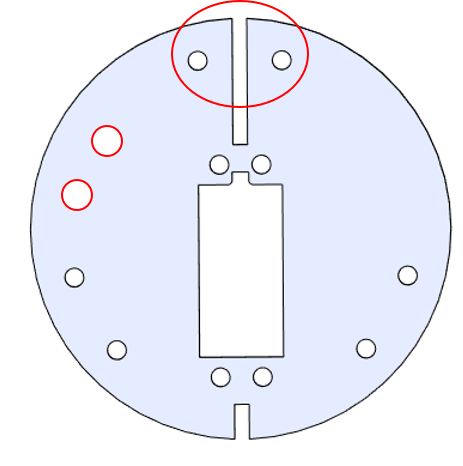
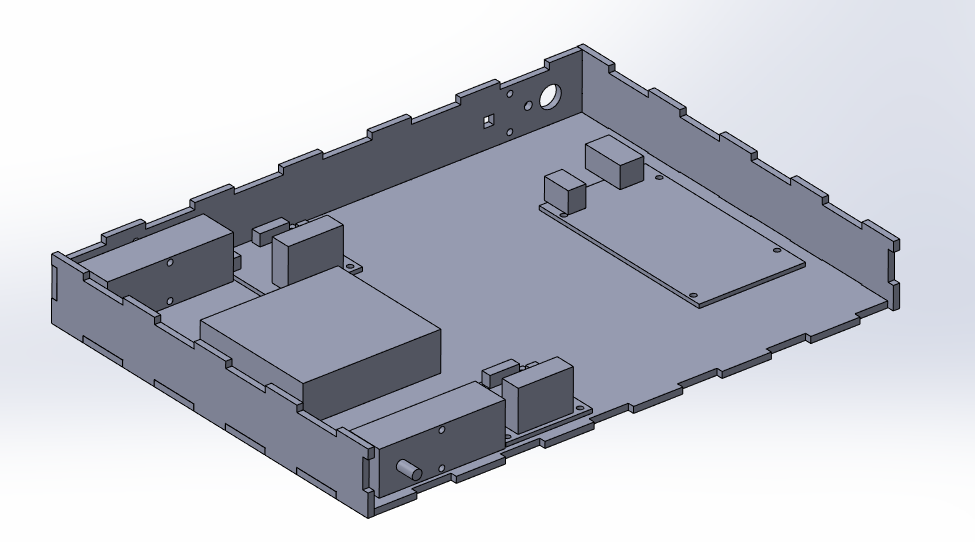
I talked to the grope and found out that the we needed a bigger car. So, I started design it. The wheels on the care are mecanum wheels and they need to be placed in a x. because the arm is going to rotate inside the chassis of the car it must be a lot bigger than the ada car. I made some CAD files of the components that the grope needs and I used them to scale the size of the car