Hei bloggen!
In this week we worked to ‘finalize’ a product so we can try it together. For the arm we are just waiting for some parts that was ordered which I believe we will get in the next week. If we get the parts next week, we can assemble the arm fully and see how that will work. We also looked into how to power the car and the arm. We do have some battery packs available, but these are quite huge compared to the arm and the car.
According to servo-Arduino-tutorial, a micro servo like the SG90 consumes around 10mA when its idle, and between 100 and 250 mA when rotating. Of course, depending on the load. Because we are using several servo motors, we need to add an external power source.
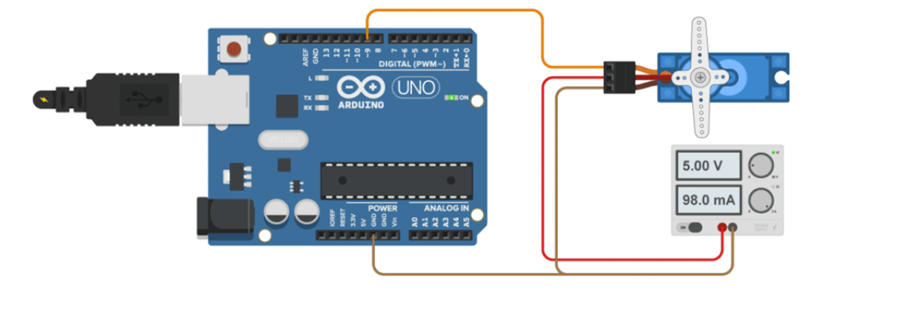
We are not sure what kind of power source we are going to use, but we will test several types.
The robotic arm needs to be driven by several servo motors. We are using the following types:


These two servos are the ones we are using for the robotic arm. We use the MG996R on the on the arm itself and the SG90 on the claw. We also discovered that the Bluetooth modules we tried was very unsure on speed and the connection so we changed to a wireless playstation 2 controller. We will use this controller to control the arm and the car.
Mechanical
I worked on some smaller problems with the arm, the plates that holders the arm for the servors was too small So I had to make them bigger. I also locked on how I could stiffen the arm in some joints, I concluded that it will be stiff enough when it is clued to getter. If not it will be a small task to stiffen the construction with some smart placed plates.