28.09.2022
We started the week by meeting at the usual time. This week we had to present how far we have come to the other groups. We had approximately one hour before the presentations started, so we wanted to get some work done in the meantime.
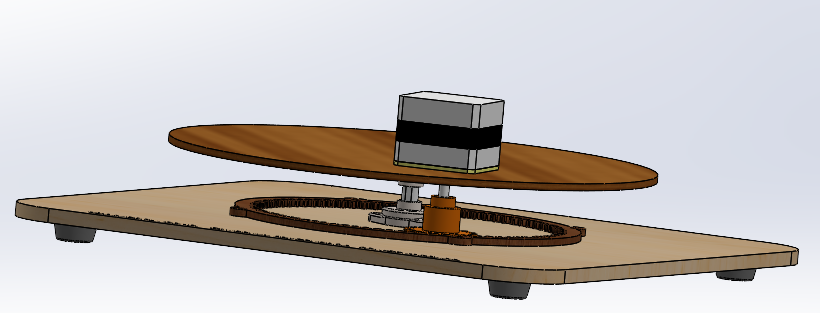
Sunny had made the hole at the top for the motor, so I started testing the calculations from last week about how many revolutions the stepper-motor must take in order for one full revolution of the base circle. However the motor was not sitting tightly and the pressure was off, so the testing would take some more time. After the presentations, the work continued. I moved the plate where the motor was a little lower, so the bottom gear would get full contact with the circle (The gear was floating before these adjustments). At the end with a little pressure, everything worked fine, but it was still making a lot of noise. We found out that the motor had to take 1892 steps before doing a full circle. For next week we decided that we are going to use only half of the circle or 180° where we divided by four or 45° for 4 players. The next step is programming a player function for every player leading to the motor moving 45° then for the next player 90° and so on while remembering the initial position.

Meanwhile Sunny and Lord continued working on the controller units for each player. The mechanical engineer 3D modelled these controller units and printed them out. This was the final result.
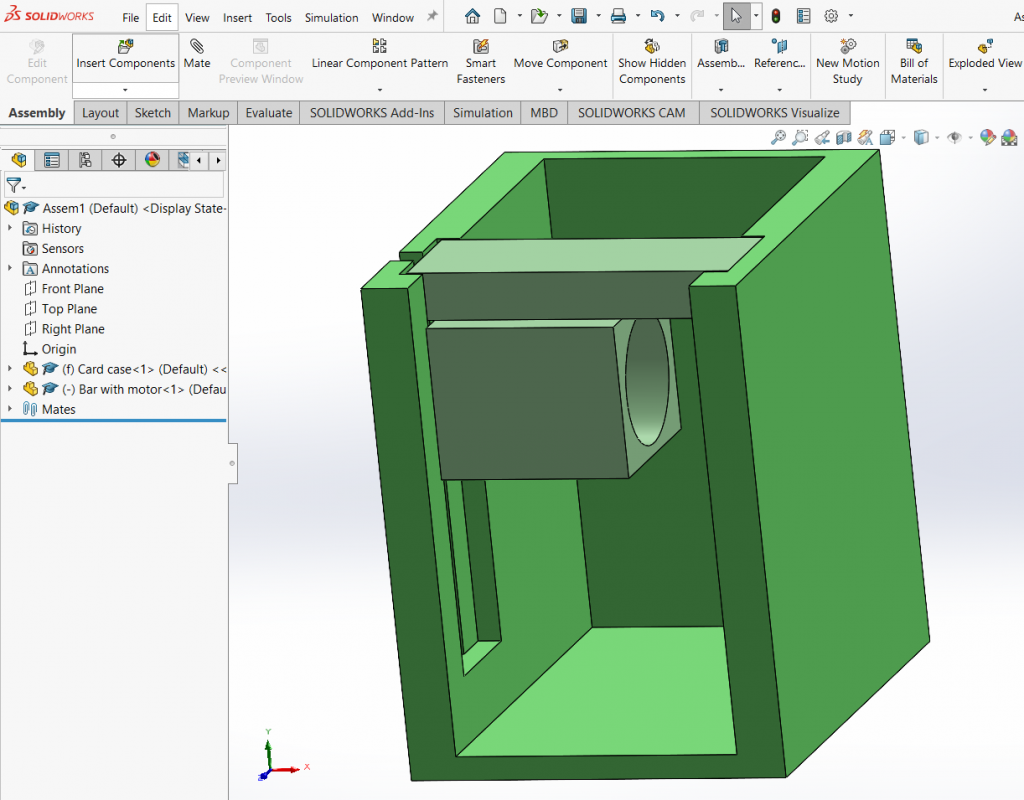
She also designed our card holder model in Solid works.
Lord continued to work with the DVA cables and the ports
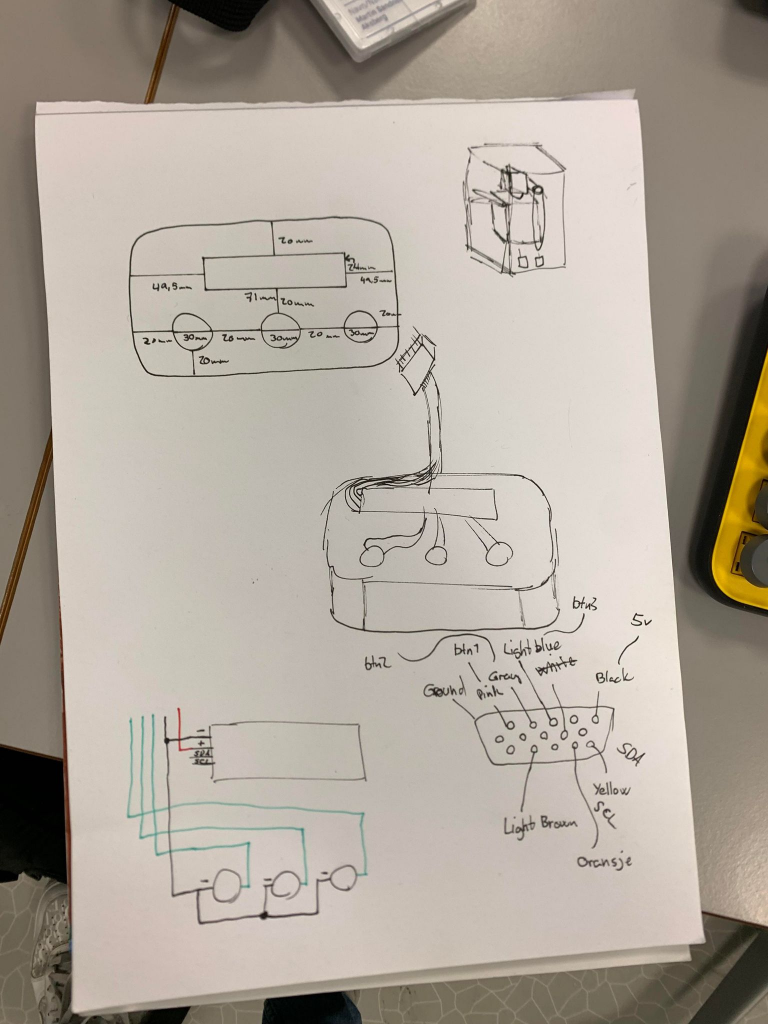
He find out which cable corresponds with which button/LCD screen pin. Later on he soldered everything together as you can see in the previous pictures and we had our first controller.
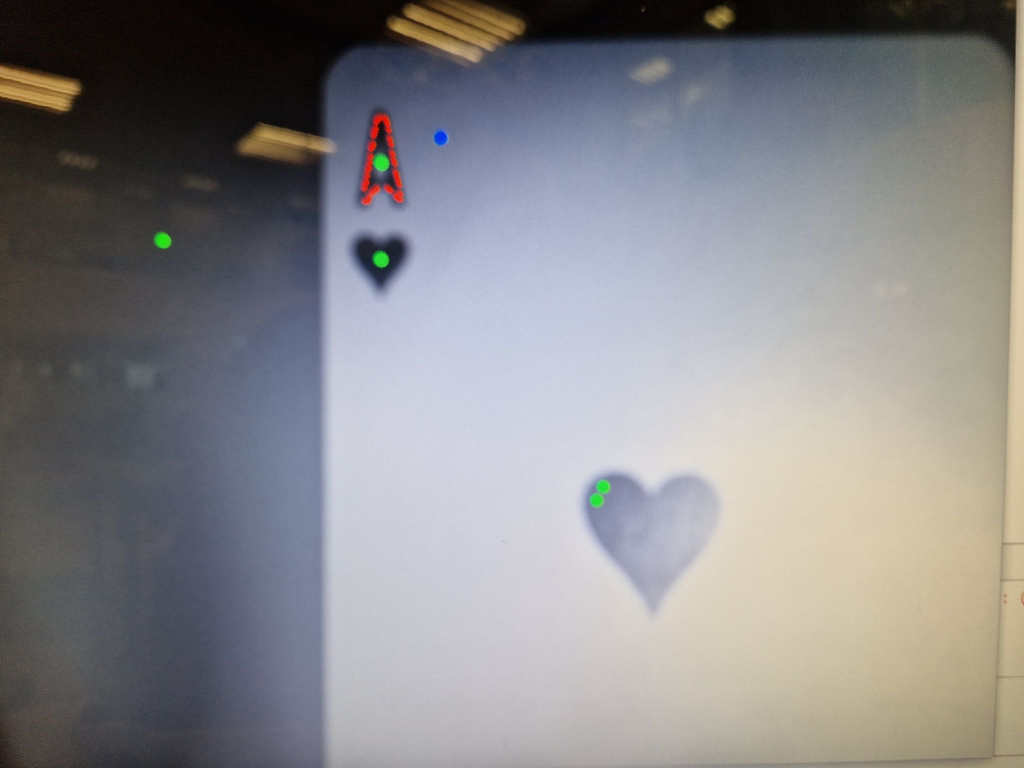
Nikolai worked on the card recognition code. He rewrote the code to make it easier to understand and adjust, which we probably will do once we test it more. Changed the program capturing the pictures with raspberry pi so that we get a better quality by using the raw stream from the camera instead of compressed jpeg quality. Added functionality to the image recognition program which allows it to find the center of all the contours in the image, which we can use to find the contour closes to parts of the image where we expect the card value and suite to be, allowing us to pick out the right contours.
The other two members of our team were sick this week. They worked from home and provided support via internet anytime.
This post was written by Martin Bozhkov