Hei bloggen!
In this weeks group work we continued developing the robot arm and working more with the computer and electrical aspects. We splitted us into smaller groups and work on some different things.
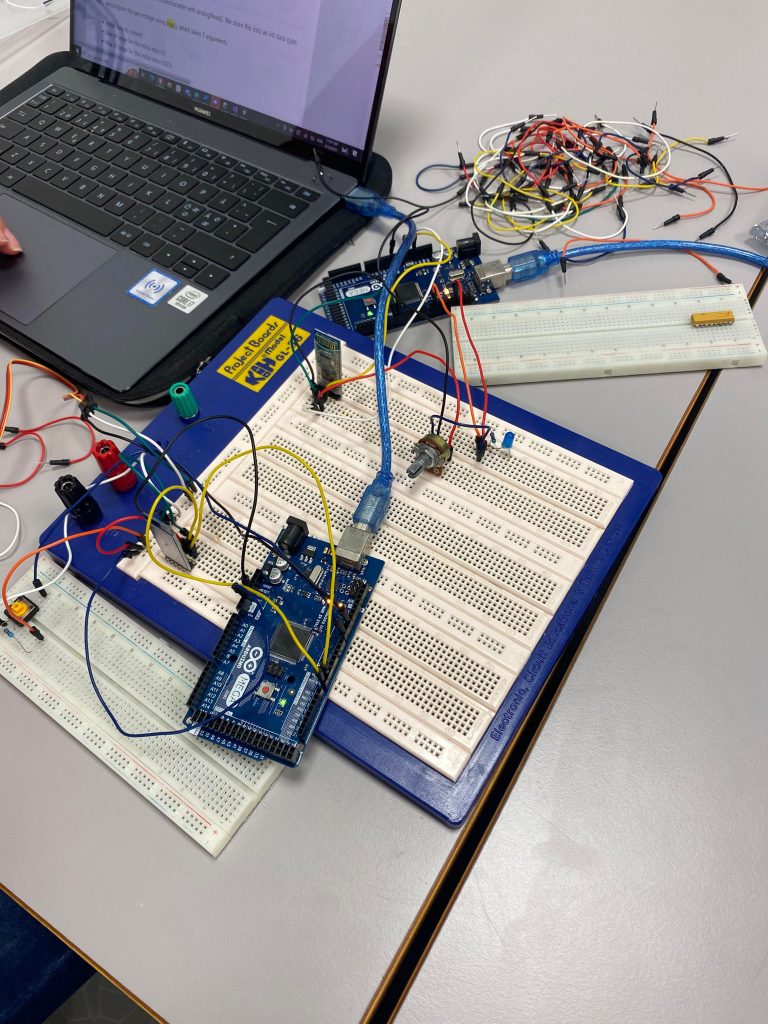
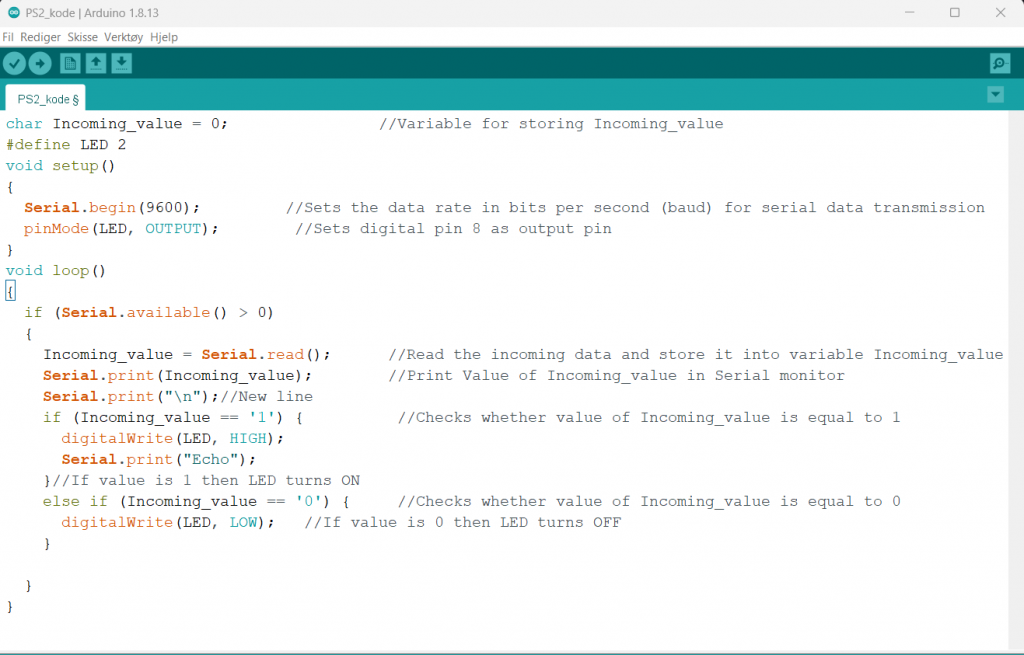
Kristoffer and Adrian worked on getting two bluetooth modules be able to communicate to each other so that we possibly could make a controller which can control the robot arm. We did this by using two different Arduino boards, two bluetooth modules, one light, one potmeter, one button and one servo motor. Our goal was to getting the button to control the light via the bluetooth and the potmeter to control the servo with the other bluetooth. We got it two work, but it was quite some delay and that messed up the connection from the potmeter to the servo.
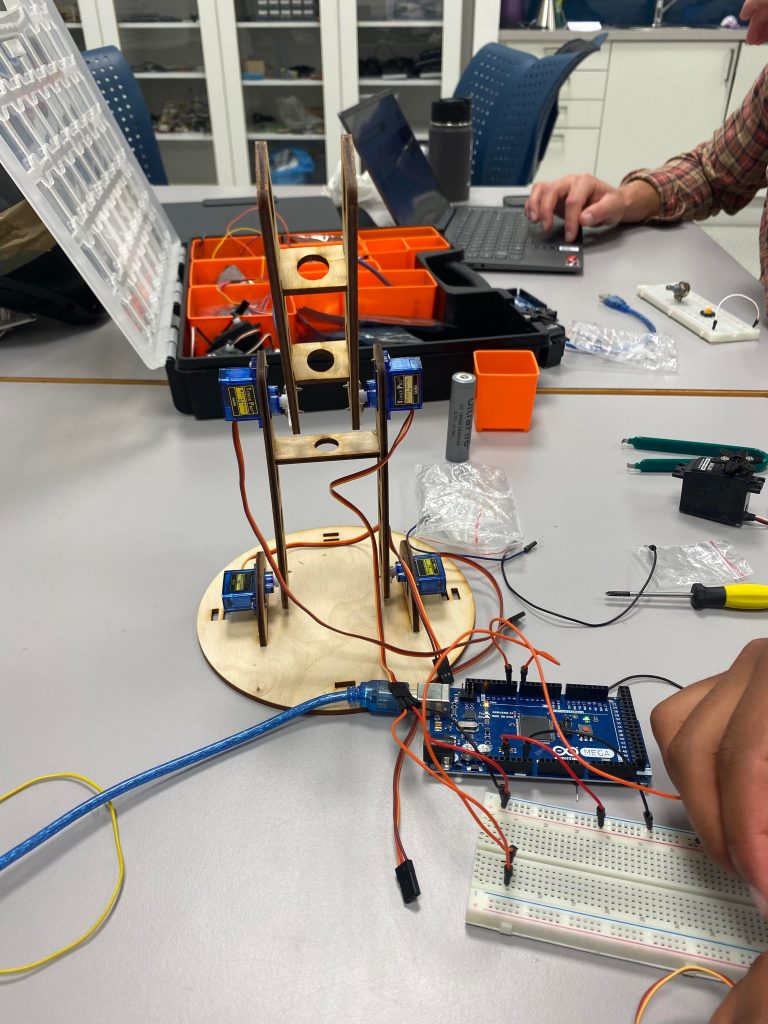
Senay and Sevag worked on the robot arm that was laser cut last week and programmed the servos that are going to be on the arm. They used some code for the Arduino to see how it would work it the servos we had. They figured out that we probably will need some stronger servos at the bottom of the arm, to be able to lift the weight that is required.
Joakim focused on how we are supposed to build the mobile element under the arm, and how to get a stabile platform. He also looked into DC-motors for rotation the two back wheels on the moving element and wondering how to connect external battery packages.
Dag worked on improving the claw, to better the functionality of it. He did also extend the arm. He printed out some additional parts for making the arm move better and smoother. He did also measurements and calculated the dimensions of the teeths on the gear.

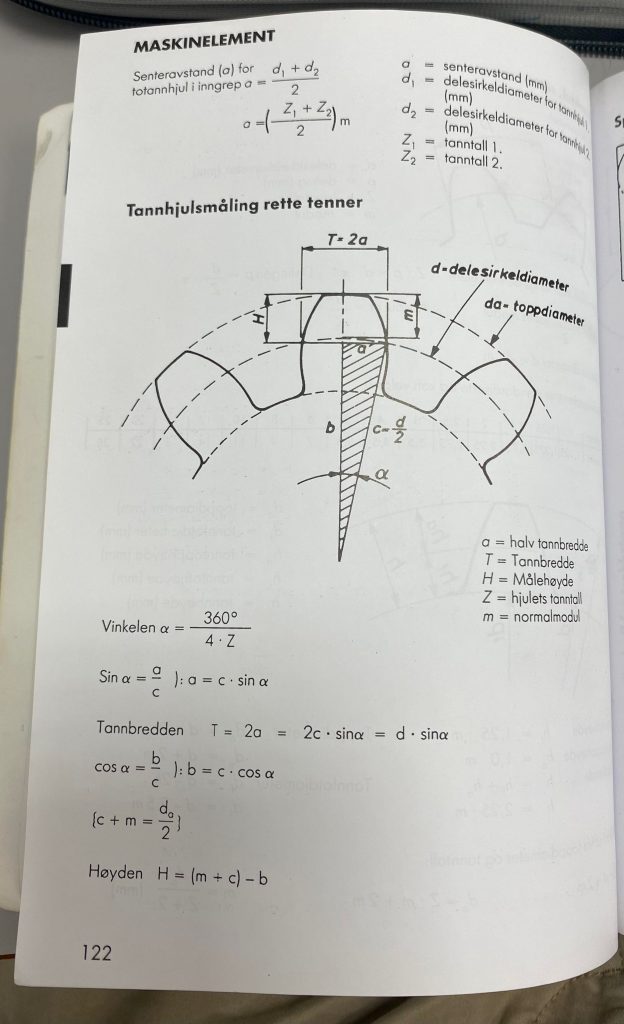
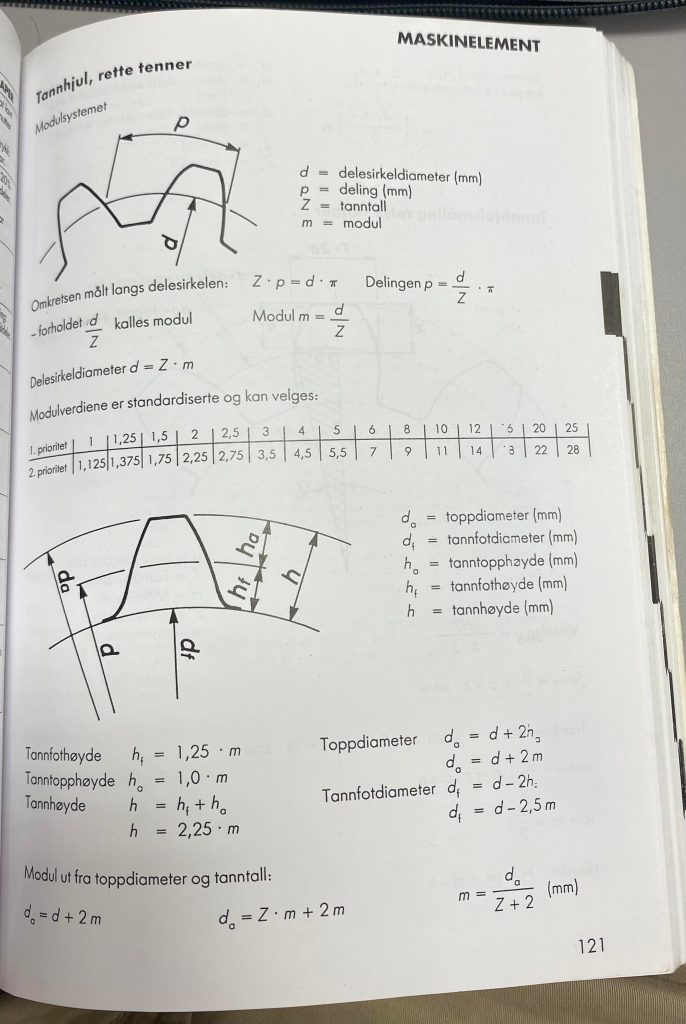
I improved the claw by making the tooth on the gears properly. I also made some change to the body of the claw to make it work smother. Because of the 3 arms the claw is getting stuck. The reason for this is that the force from the engine is not in centre and it is some play in the joints. If I make the joints tighter it works but it is very hard for the engine to drive.