Hei bloggen!
Today we have explored the parts we are going to use, functionality and application of the robotic arm.
We try to limit ourselves so that we don't gap over too much in the initial phase. The level of ambition is sky-high, but we get good advice from supervisor Zoran, which means that we set ourselves a bit lower.
-We have plans for a robotic arm, with gripping capability, on a rotating platform, which can also drive around.
-The arm itself should basically be able to rotate 360 degrees - 180 degrees in one direction, and 180 degrees in the opposite direction. -We have tested step-motors, servomotors and distance sensors. As you can read from the drawing, we will try out a step-motor that can rotate the arm itself. Then two step-motors that move/lift the main weight of the arm. Two step-motors on the next link which work from there and outwards. We then use two servo motors on the last link, and one servo motor on the gripping claw, which again consists of three gripping claws. Dag is working with solidworks to prepare a prototype of the construction. The picture below shows a design of how the arm probably will look like.
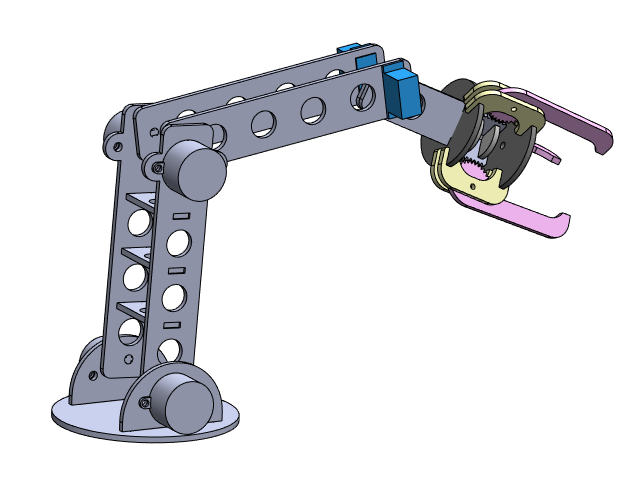
Mechanical We will make the arm out of plywood because it is fast to manufacture parts from it with the laser cutter. This makes it easier to prototype ideas and see if they work in real life. If we have time, we will try to make the arm out of Plexiglas The claw concept we have landed on is a 3-arm. We want 3 arms because it is more likely to be able to grab a bigger range of objects. The claw will be able to grip objects but will also work as a basket for smaller objects. The three concepts that I have considered. Worm gear in centre. This claw will have a worm gear in centre that moves a plate up and down, when the plate moves up the claw will close. The picture below is a similar idea.

Claw with pinion gears This claw will work almost like the one with worm gear. But instead of worm gear it will be 3 gear racks. Claw with rotation arms. Rotation movement claw, this claw will not convert rotational to linaria in the same way as the other concepts. This concept will drag the claws towards its self when closing. When it opens it will push itself out. The concept that I have selected is the one with pinion gears. I think this concept will be the best one because the gears will provide some accuracy. It is not the easiest to make but I think the effort will be worth it.