Hei bloggen!
In our project for this semester, we chose to make an robotic arm that can grab onto an object and place it in a different location from where it was picked up from. This can be a box it will be put into or something similar. With this project there comes some requirements that we want to achieve with the project. This idea came as inspiration from previous projects done in this subject, but also after a good amount of brainstorming from nothing to everything.
Group members of this project is:
- Senay Araya – Computer engineering
- Kristoffer Paulsen – Computer engineering
- Adrian Ruud – Computer engineering
- Sevag Narinian – Computer engineering
- Joakim Barnevik – Electrical engineering
- Dag Halvorsen – Mechanical engineering
Under we have made some requirements that we want the arm to be able to do, but this requirement list is far from done. We will probably get deeper into this the next week and see what we want to prioritize and which of the requirements we will do if we get enough time. The list is just some of the things we talked about.
Some of the requirements or function we want the arm to have is listed below:
- 3-Axis arm
- 3 pin claw
- Grab/pickup function
- 360 degrees rotation
- Wheels for moving
- Control the arm
- Add sensors to the arm
- Make it all automatic
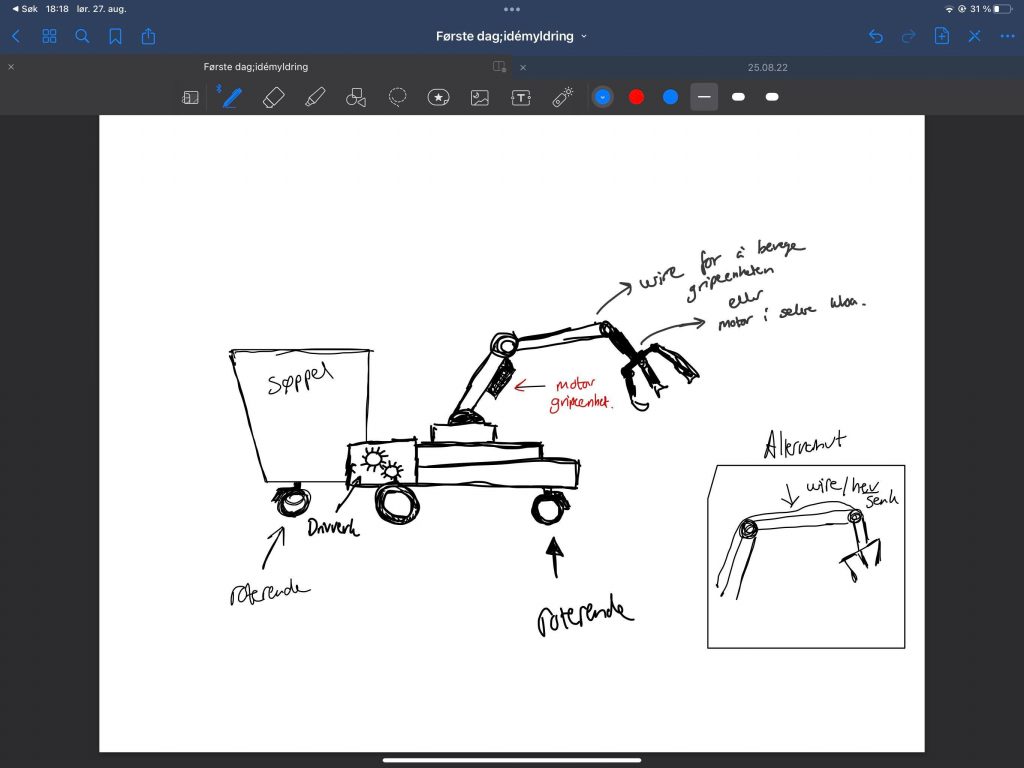
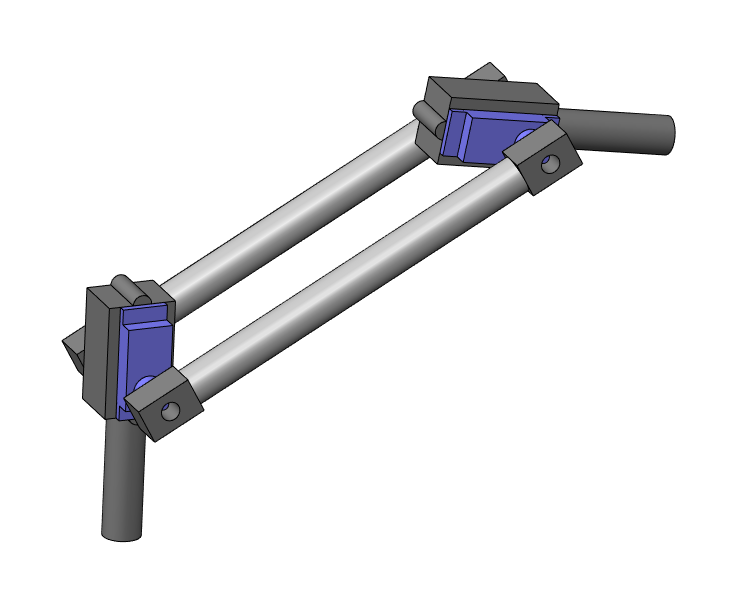
This two pictures are drawing that was made during the meeting. This are examples of designs of the complete robot arm can look like and a drawing of how the arm itself can end up looking like. These drawings were done by Joakim and Dag.