I løpet av denne perioden har vi omprogrammert akselerometeret for å kompansere med gyro sensoren slik at vi får vinkelhastigheten via akselerometeret. Dette tok sin tid, og vi fant ut at det ikke var praktisk mulig å gjøre dette. Først pga. støy og at ut verdiene ikke var nøyaktige nok.
Dermed måtte vi tilbake til tegnebrettet, og fant da ut at vi måtte bruke PID hvor Inputen er vinkelen vi har og pådraget regnes ut av PID algoritmen. Derfor satt vi som mål å få avlesninger fra akselerometeret oppgitt i grader og ikke vinkelhastighet. Deretter måtte vi kalibrere sensoren, slik at sensoren leste 90* ved loddrett tilstand. Dette holdt ikke i og med at vi hadde mye støy som førte til feilsignaler innimellom. Dette gjorde at vi trengte litt research på filter for reduksjon av støy.
Dermed fant vi ut at vi trengte noen støyfilter i systemet vårt for å forhindre støyen på ut signalet, som har oppstått tidligere.
Vi la til 2 filtre til å begynne med, en som heter EMA og den andre SMA. Disse filterene ga oss litt mindre støy men vi er ikke helt fornøyde med utverdien.
Derfor bestemte vi oss for å lese oss opp på kalman filteret i og med at vi hadde hørt at det kunne løse problemet vi har.
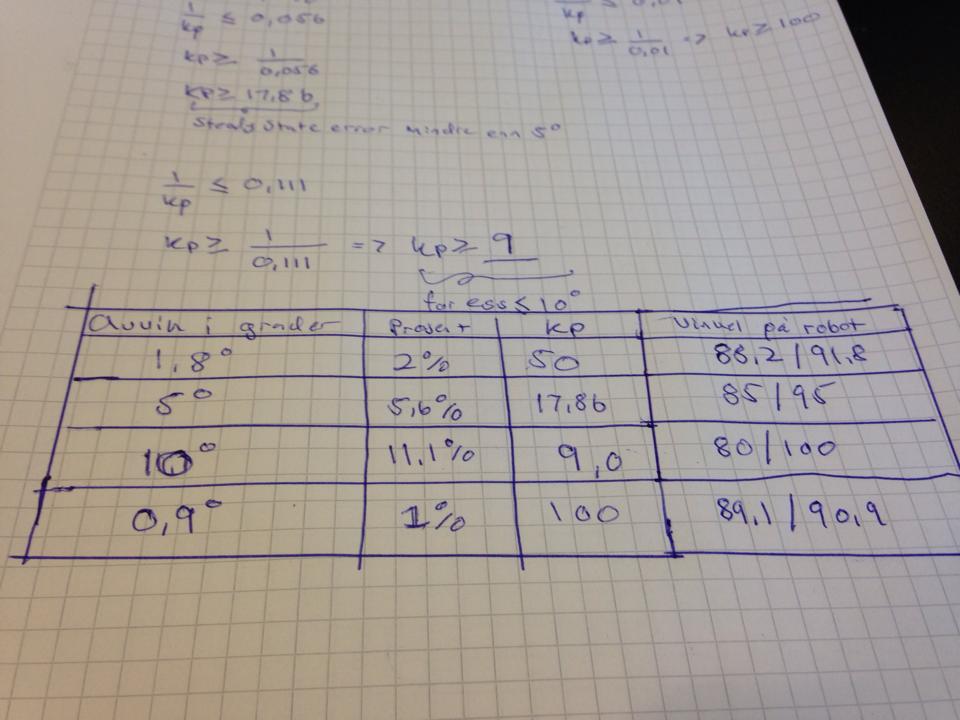
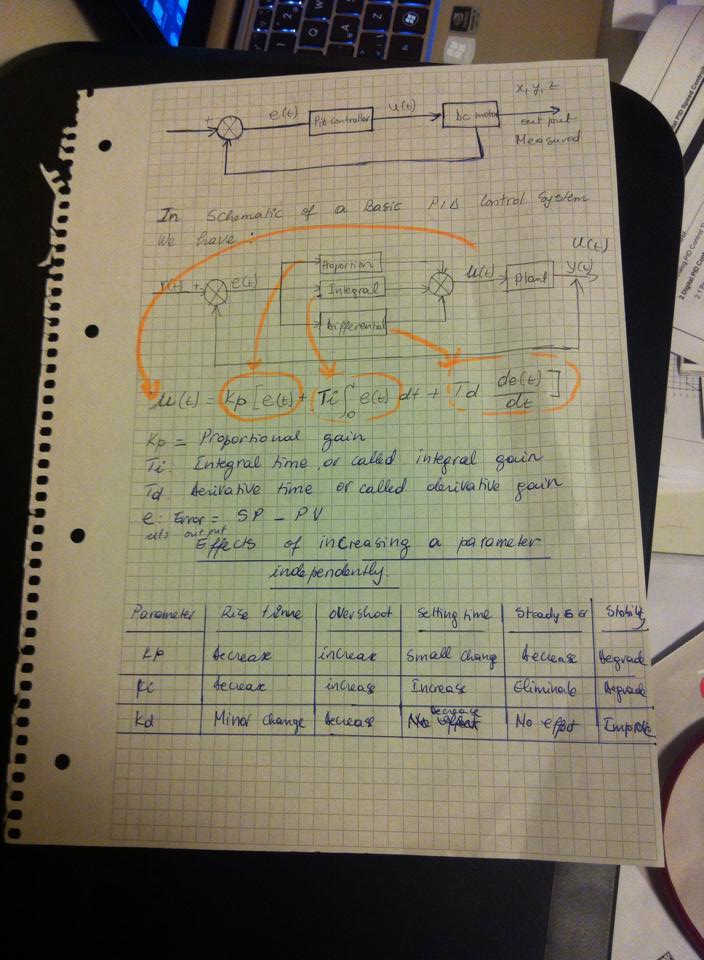
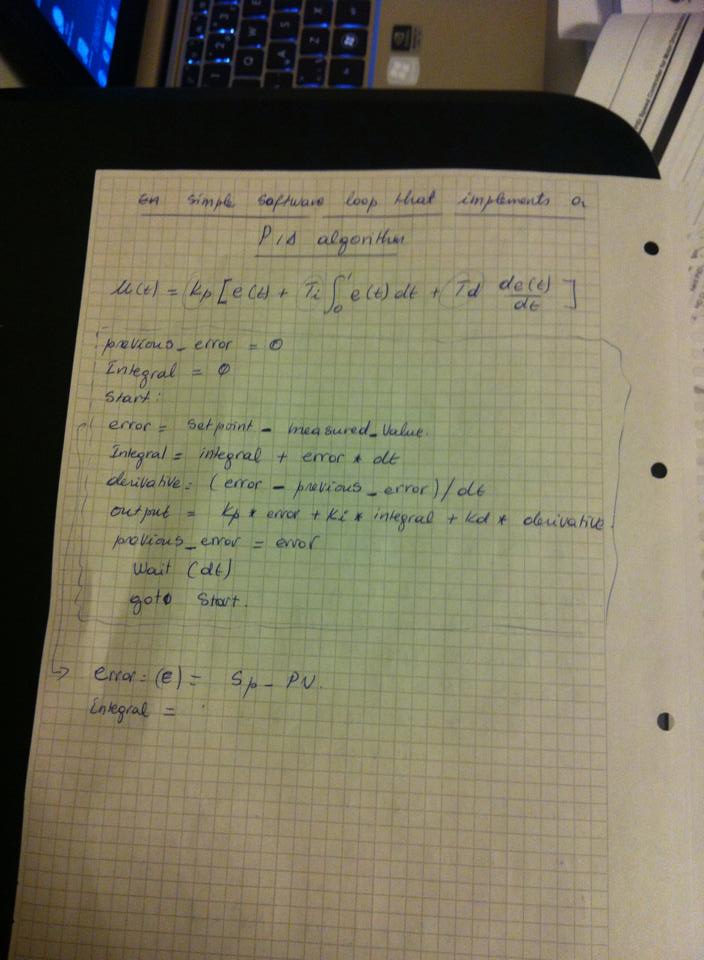
Vi startet også å regne ut og bestemme verdier for konstantene våre i PID algoritmen, ved å velge en rekke med avvik fra den ønskede verdien (roboten i balanse, eller 90 grader) samt at vi skrev en ordentlig forklaring på PID regulatoren: