Denne uken ble vårt fjerde gruppemedlem Chadi Chehade med i gruppen vår.
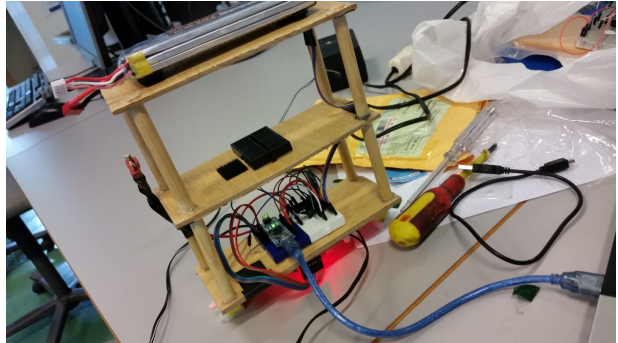
Komponentene var nå montert på chassis og vi var klare for å finne en måte for å få roboten til å balansere på. vi prøvde først å løse problemstillingene ved å bruke fysikk som utgangspunkt, vi så på en rapport fra en tidligere bachelor oppgave(Invertert pendel) vi så på ligningene de hadde brukt for moment og fart, og fant fort ut at dette var en litt for stor jobb å gå denne veien i dette faget her. Og etter en prat med Zoran Dokic(faglærer i blant annet reguleringsteknikk) ble vi enige om å bruke en PID regulator for å regulere bevegelsen på roboten vår.
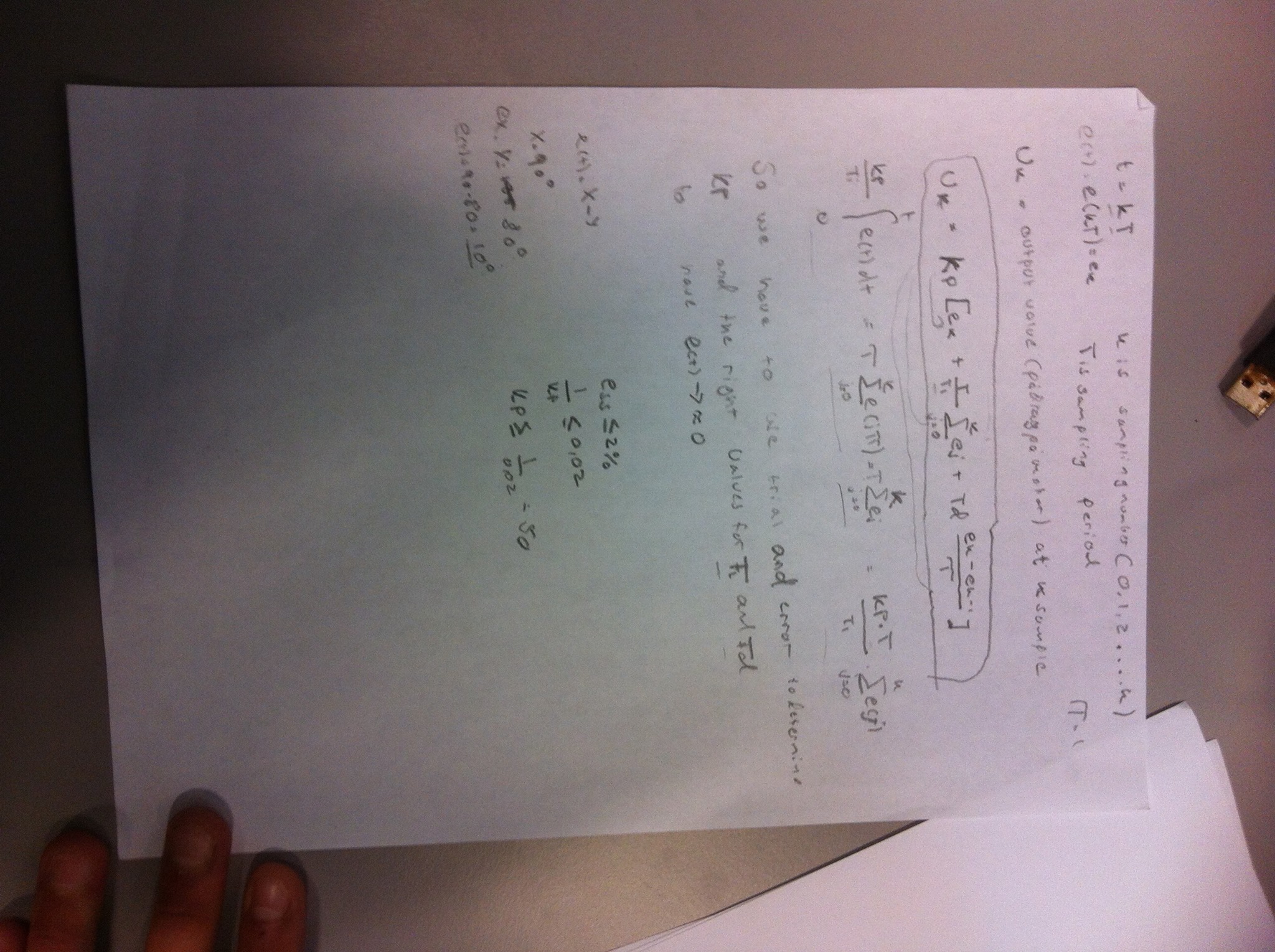
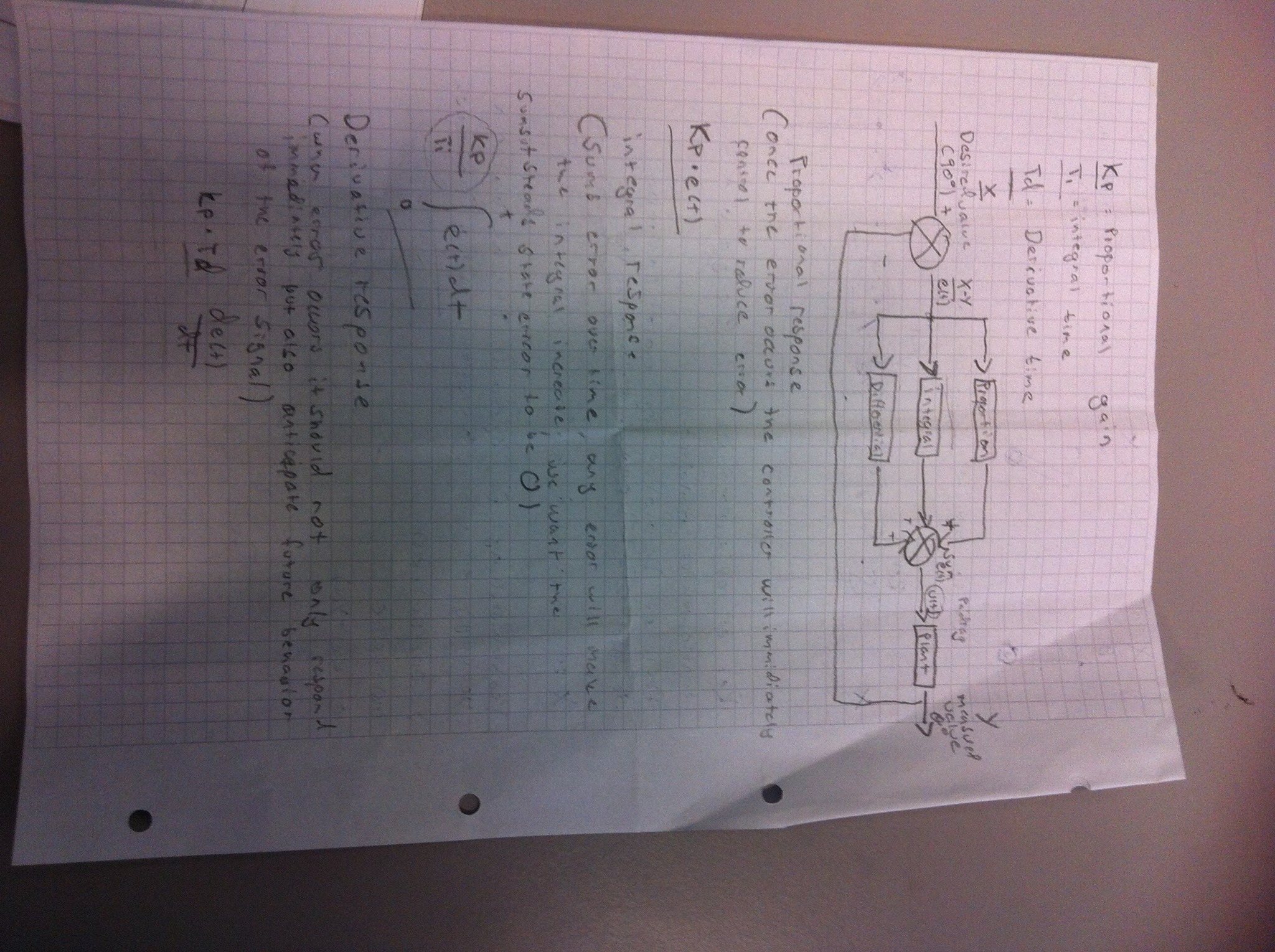
Armaan og Albert startet så finne en algoritme for PID regulatoren, som de klarte å finne: