#1
This week we are working on further developing the tension based system.
Now that we are closing in on the final weeks, the design is coming along.
It will be a dual spring design, where a spring is connected too a new launch-plate
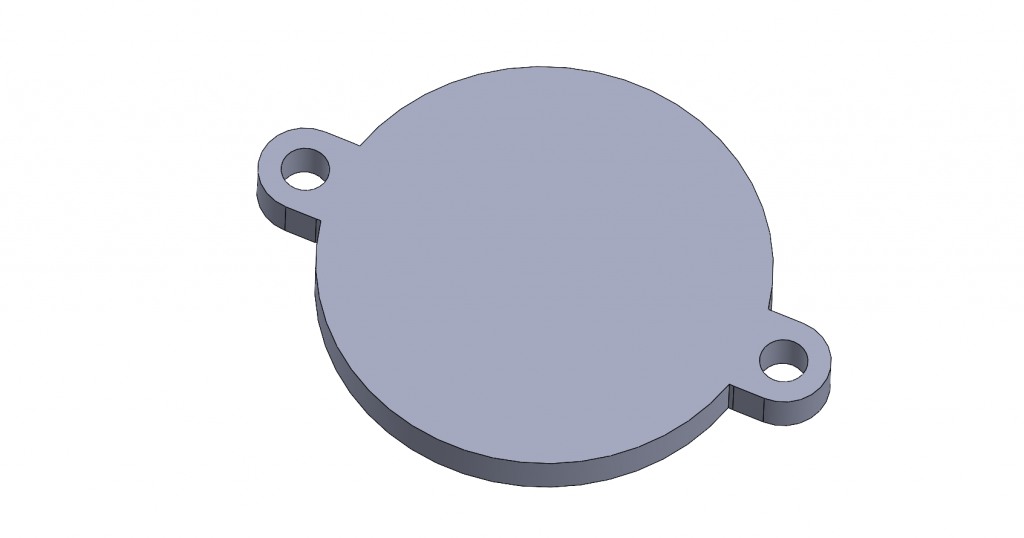
The plate will be stabelized by 2 supporting beams which are integrated into the barrel walls.
#2 Trajectory Calculation
Using Newton’s equations we can figure out what cannon angel and wind up is necessary of the shoot a given target. A steppe motor pulls a tension mechanism which purpose is to speed up the launching plate. The projectile leaves the chamber with an initial speed, which can be decomposed into v(x) and v(y) depending on the angel of the cannon
barrel and the speed of the launching plate. From looking at the specs of stepper motors, we can find the energy exerted on the launching plate (potential spring energy).
From this we can deduce the speed which the
projectile will have using the formula E = 1/2kx^2 and Ek = 1/2mv^2(barring other external factors such as friction work). Now we have a rough estimate of what the projectile speed will be coming out of the cannon, and we can then plug this into Newton’s law of motion. It is important to state that this will not alone work, there is drag and friction
working on the system that we will have a hard time figuring out. The idea here is to have a decent approximation and to work from there, finding more numerical solutions from experiments and figuring out reliable ranges of distance for the cannon to hit.
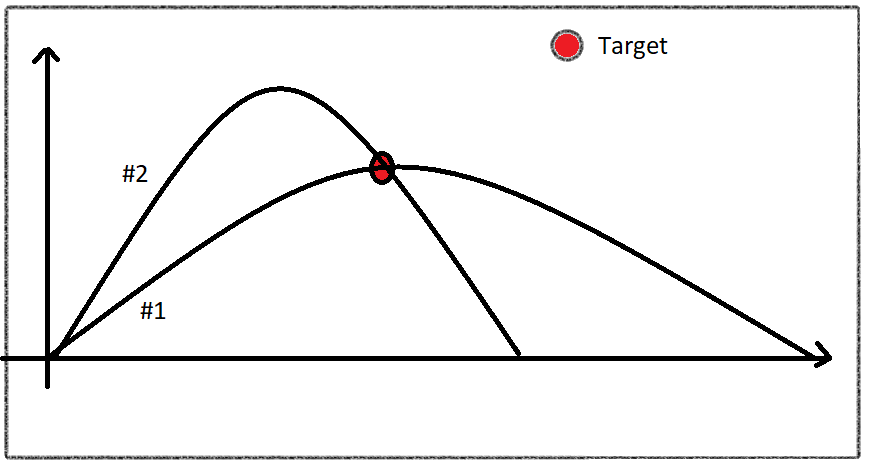
There are a number of solutions for hitting a target as illustrated below. The choice of trajectory falls on
the target being hit more towards the peak of its height (#1 trajectory), where v(y) = 0.
Work is being done to integrate this into our servo and stepper motor program. So that given a target distance
and orientation, the cannon can succesfully angel and wind up its firing mechanism in such a way that it
hits the target. The distance is found using a lidar sensor.