Table of contents:
- #1 Modelling progress (Daniel)
- #2printing(Daniel)
- #3 Search pattern in the making (David)
#1 modeling progress
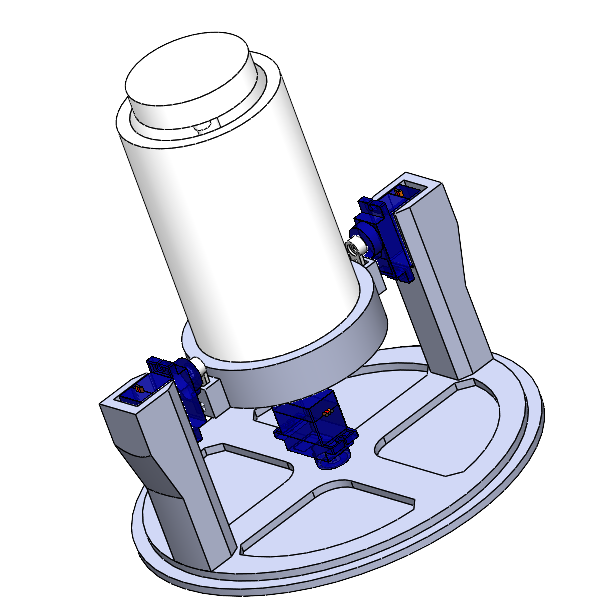
The prototyping and modeling of the cannon is going great.
As I am working on printing a physical cannon, so that the other guys can work with something more tangible.
Right now I have not figured out the final launching mechanism. But I have many ideas pending.
The control of the cannon is handled by 3 servos. 2 in the Y-axis, and 1 in the X-axis.
The reason for this split is that the “Y-servors” are set under more load and thus, more friction. My way of thinking is that it is better to overengineer that to have the mechanism fail.
The “X-servo” is placed into a separate wheel, and have a gear with the base so that it can rotate.
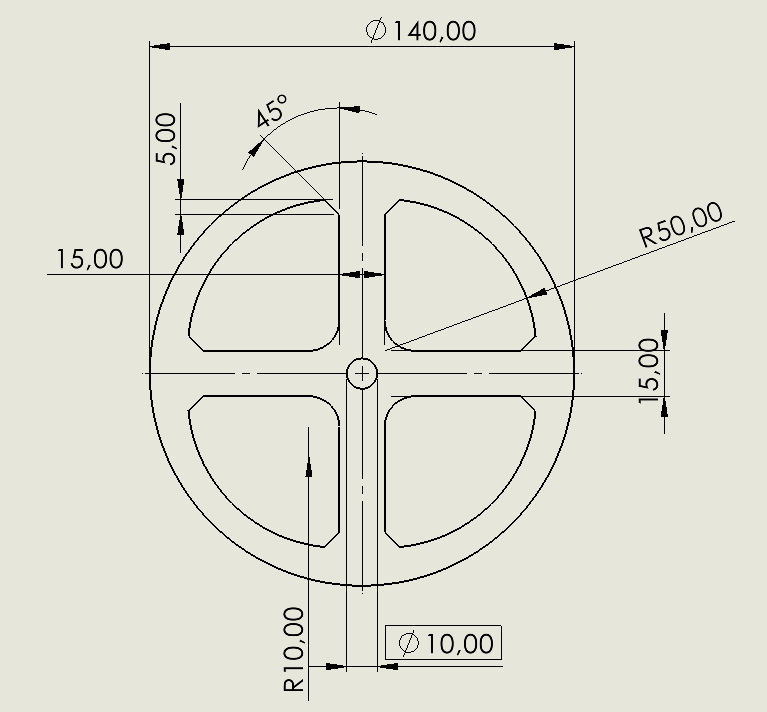
The original method of launch was springs. They would be fitted into the 4 holes on the drawing shown under:
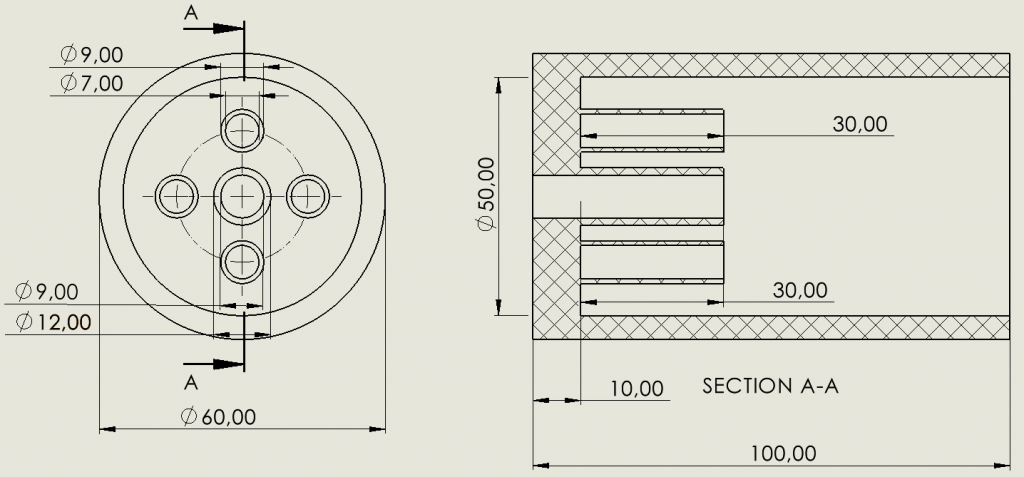
After actually printing the part og the cannon, I noticed that there where to much friction in the internal stabilization barrels for the springs to fit inside. To fix this I will ajust the inner diameter a bit to compensate.
#2Printing
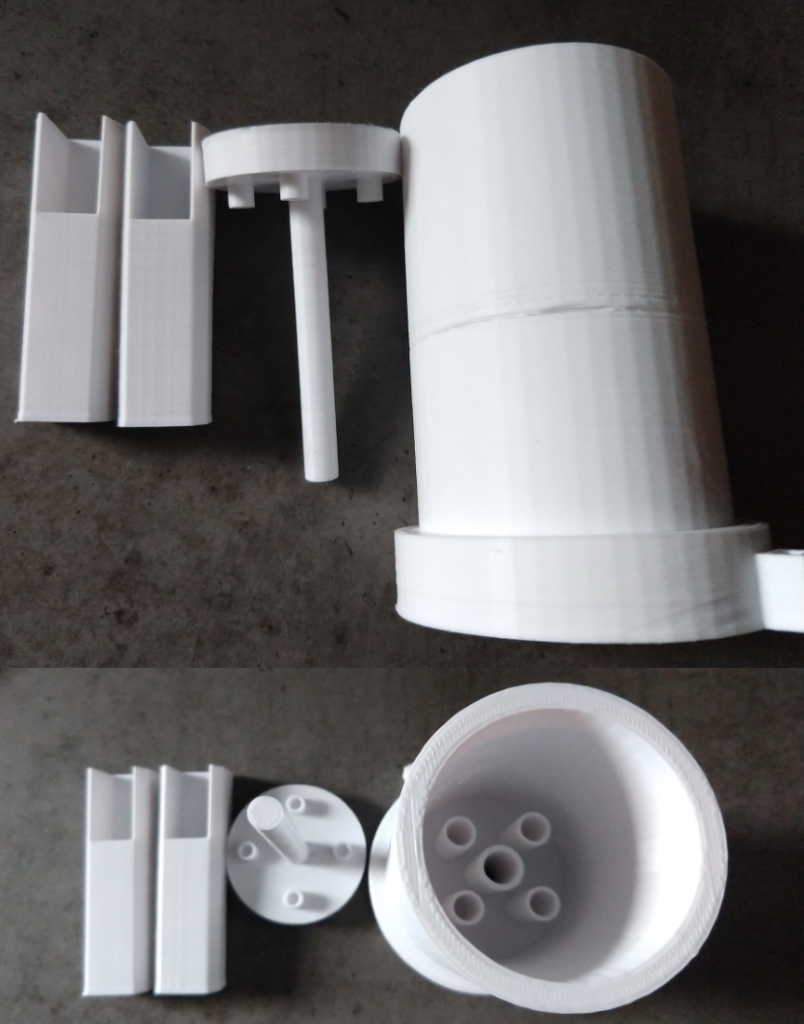
You can see there is a printing failure about halfway up the barrel. I do not know what caused this, but hope that next print will not have the same defect.
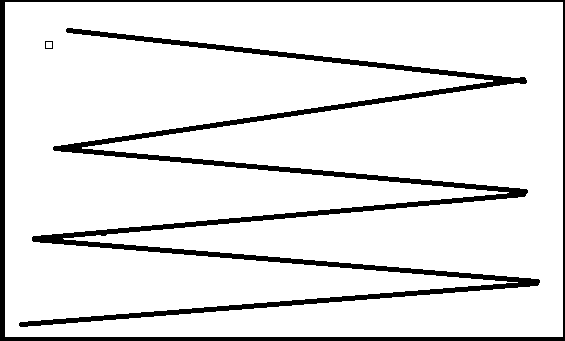
#3 Making of a Search Pattern
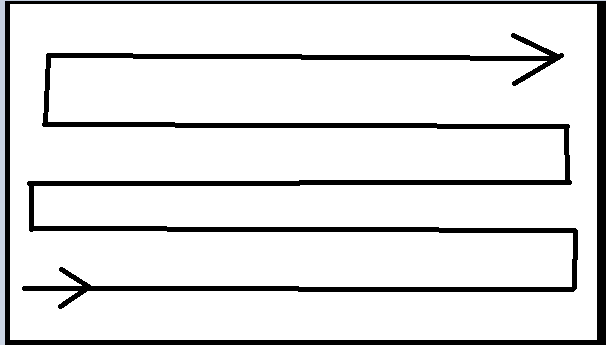
The lidar sensor needs to rotate around and look for a target. I imagine it something like this; Have a servo motor move along its full range across the x-axis, then have another servo motor incrementally regulate the y-axis turn.
It remains to be seen just how good of a datapoint collection we get using this pattern paired with the lidar. In the meantime, I’ve also been toying with other ideas such as the one seen below. This has all been programmed in Arduino and tested on two independent servo motors.