List of content:
- #1 Summary of the week (David)
- #2 Meeting summary (David)
- #3 Sensor Pugh-matrix (David)
- #4 Component list (Group)
- #5 A-, B- and C- Requirements in Norwegian (Group)
- #6 Ejection chamber solidworks (Daniel)
- #7 Lidar sensor compatibility, how to wire and operate on arduino (Jafar)
#1 Summary of the week:
After a somewhat slow start to the project with two of our initial members leaving, we’ve gained some semblance of control and started to act according to a plan.
We’ve drawn inspiration from the scrum model, it goes like this; Every Monday and Thursday we have a short meeting timed to 20 minutes. We decide upon some tasks for each member to complete. We ask three questions, what did you do? What will you do? And finally; is anything in your way? The 20 minutes keeps the meetings disciplined, short and focused. Every 3 weeks, we meet up for a longer meeting to address things that take extensive discussion, this meeting will last between 1- and 1 hour 30 minutes.
Currently Daniel is working on modelling the cannon itself in solidworks, due to feedback from Richard he has decided to scale down a bit and Is currently working on reducing the size of the ejection chamber, and other components of the cannon. Daniel is also looking at different motor options to load the spring, which accelerates the firing plate.
The Arduino Nano Sense BLE has been ordered and is on its way. One of the features which me (David) and Jafar are going to play around with is the gyroscope function. Figuring out the x-, y- and z-orientation of the cannon is going to be crucial to make software direct the cannon.
As of now we’ve started to look up how to configure a lidar sensor with the Arduino, to determine the distance to the target. More on why we arrived on a lidar sensor down below in the Pugh-matrix. Jafar has also been playing around with the servo motor from our old Arduino kit, concluding that we probably need a better servo motor for some of the tasks. For now, the servo motor available might be sufficient for steering the lidar sensor along the x-axis.
#2 Meeting Summary 21.09
Inspired by the scrum model,
What did you do?
What will you do?
Is anything in your way?
Future Tasks:
Write about scrum work model for our group
Component list -Nano, J-link, Lidar
Fetch Lidar and J-link (Thursday)
Write HMS rules around the cannon
What type of motor is needed to push the launch plate? Find some options
Till Thursday 21.09.:
David:
-Add to component list
-Make an order for the Nano BLE (Received)
-Sensor Pugh-matrix to blog
-Add A-,B-, and C-requirements to blog
Jafar:
-Code for servo motor that rotates the Lidar
-Lidar to Arduino compatibility, how to wire and what libraries are needed (tutorials)
Daniel:
-Model ejection port and firing plate for the cannon (done)
-Make an order for the springs required for the firing plate
-Model the framework around the ejection port so that the cannon can move in the x- and y-axis
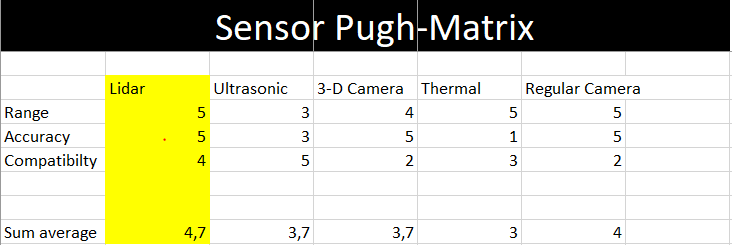
#3 Sensor Pugh-matrix
What sensors are most adequate for a cannon? Given the options at hand, there are three criteria that make a lot of sense; Range, Accuracy and compatibility. From a scale of 1-5, which of the available options wins out? Here’s a look.
#4 Component list (Subject to change)

#5 A-, B- and C-Requirements (Subject to change)
A-krav
Maskin krav:
- Lage kanon styrt av arduino med en fyrings mekanisme
- Fyring av et bestemt prosjektil, maks vekt 0.5 kg
- 3-D printed kanonløp
Elektro og data krav:
- Rotering og justering i y-akse
- Smart styring av løp for presis avfyring
- Positions gjenkjennelse, klare å treffe objekter som står fast
B-krav
Maskin krav:
- Ha mulighet for og skyte opp til 3 forskjellige prosjektil
- Kanonen skal kunne treffe målet med 75% av dens skudd
(antatt at brukerfeil ikke oppstår.)
Elektro og data krav:
- Bluetooth/smartphone styring
C-krav
- Ha mulighet til å tracke og treffe et objekt i bevegelse
- Ha mulighet til og skyte alle typer prosjektil som veier under 0.5 kg.
- Valg av prosjektilet skal skje automatisk fra kanonen med å måle bølgestyrke som kommer tilbake fra objektet (jo tyngre objekt, jo større bølgestyrke, jo tyngre prosjektil)
#6 Ejection chamber solidworks (Daniel)
While talking with our professors, we discovered that we had overbuilt the cannon immensely. We had planned on constructing it with a 25mm diameter metal barrel. which turned out to be a mayor complication when it came to loadbearing and servomotor power.
The barrel alone would way about 16kg, which when trying to track objects to shoot at is suboptimal.
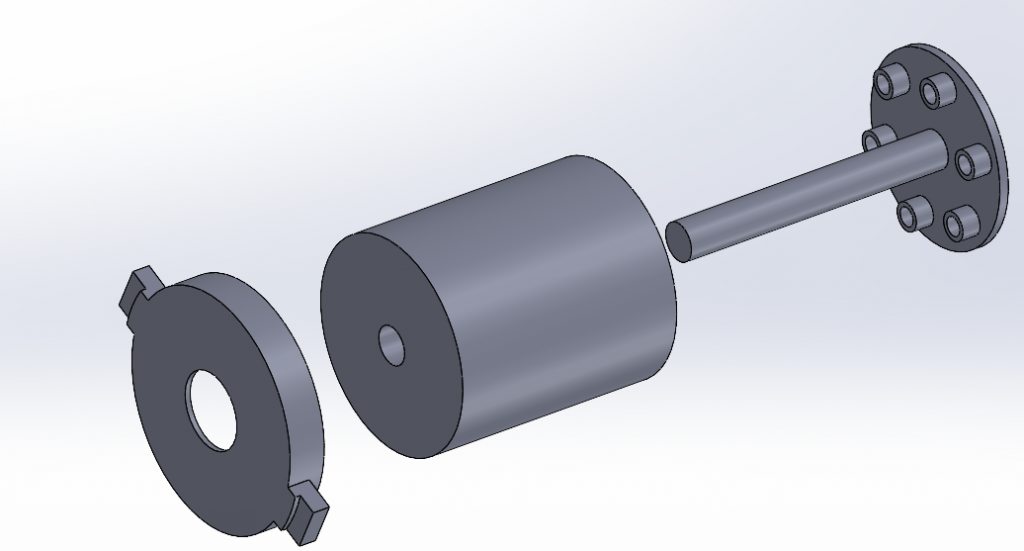
Therefore, wee needed to downscale the cannon in order to make it achievable to build within our timeframe and with our resources.
The main factor we reduced was the barrels inner diameter, which got changed from 200mm to 40.
Now, as the springs we have ordered is on the way. we are close to producing our first prototype.
#7 HMS of the cannon(Daniel)
When it comes to the safety aspetcs of building a cannon, there is much to consider.
Dangers such as shooting out eyes, pinching of fingers or bodypart and blugenoing dangers as the cannon tracks targets.
General caution solves most of theese. Practices such as wearing safety glasses and protective gloves mitigate much of the danger.
There is a potential sollution in software aswell. Maybe coding a software barrier.
If the force on the cannon as it turns is greater than it should. Then the barrel should stop mooving for a while, to make sure that it does not blugeon the user.