We first started by with the assemble of our team which consists of all the different engineering disciplinaries. Since most of our bachelor group have chosen smart systems as a optional course we thought it would be a good idea to work together to get a kick-start on the bachelor project.
Our project team consist of the following members:
– Erlend Vassli (Electrical Engineering)
– Marius Olsen (Computer Engineering)
– Per-Terje Rasmussen (Mechanical Engineering)
– Shadi Al-amodi (Mechanical Engineering)
We then started looking into different ideas to work on in this course. Some of the ideas was as follows:
– Board games of various types.
– Office chairs that is capable of going back to initial position.
– Basketball hoop where it is impossible to miss the target.
After going through the various types of ideas we finally settled on a automatic watering system for plants. The idea behind the system is that it should consist of a vehicle that has a water tank attached to it and is able to drive around a flat recognizing plants and watering them without supervision. Since we have two mechanical engineers on the team we want to be able to 3D-print most of the mechanical parts of the system. The electrical and software aspects of the system will be powered by Arduino, where we will be using several sensors for the Arduino. During some of our brainstorming meetings created a few sketches of our system:
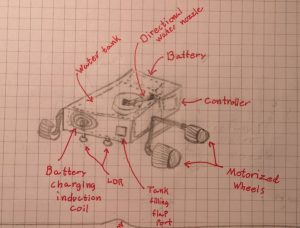
Figure 1: Shows an overview of the car and components of the system.
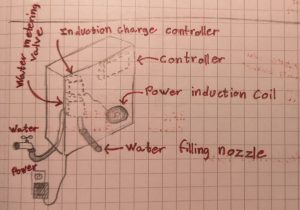
Figure 2: Shows an overview of the docking station with water refill and charging possibilities.
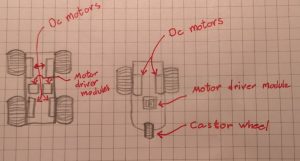
Figure 3: Shows an overview of the car.
After settling on the automatic plant watering system we could start focusing on the requirements. This is some of the requirements we currently have:
A-Requirements (what we need to fulfill):
– The system shall be able to transport atleast 1 liter of water.
– The system shall be capable of watering plants with a fixed size flower pot.
– The system shall be able to be controlled by remote.
– The system shall be able to identify plants.
B-Requirements (makes the system even better):
– The system shall be autonomous in the sense of navigating without help from the user.
– The system shall be capable of watering plants with flower pots on different sizes.
C-Requirements (nice to have, if we have time):
– The system shall be capable of charging itself on a charging station.
– The system shall be able to refill water autonomously.
– The system shall be able to access remotely from a smart phone and/or computer.
Project Management:
During these two weeks we have also had some focus on project management where we use a Google Spreadsheet and Trello to manage various tasks and deadlines for our project.

Figure 4: Project management sheet we are using in on our team.
Modelling:
To be able to see how our system would look like (at the first stages of our project) we found it helpful to create various types of models. It is important to mention that these images models our system at the current stage of design and there might be changes as we move onwards.
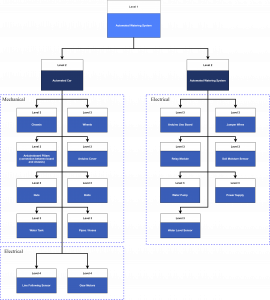
Figure 5: The physical architecture of our system.
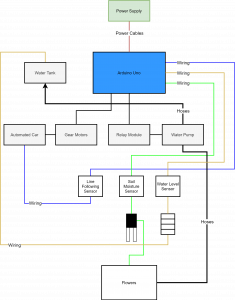
Figure 6: Connection overview of our system.