Petter:
I’m continuing the work on the input system of the cube. It was more comprehensive than anticipated so I have spent my time, discussing and trying out different options as well as gathering info from more experienced users of unity.
William:
I have done research on how to implement a scoreboard from Unity to a database. Also been working on the scoreboard in Unity, I have an idea how I want it to be implementet and lookwise. We had a meeting on thursday where I had futher discussions with Even.
Herman & Tom Erik:
We’ve been discussing the specifics of the physical design elements and obtain all necessary tools. Work is still being done on refining the sensory circuitry of the system.
This week Herman and Daniel set up the link between Arduino and unity with protocols for communication. We decided that the easiest way was to send a string with several digits to decide which finger that is doing what and what to do. The first digit describes the finger and the second the Boolean action of on or off. The most natural way to order the fingers would either be between 0-9 or 1-10, but we decided to order them after which pin the corresponded to and therefore scales between 2-11. Example of this would be if you where to say that finger 8 where to touch something the Arduino would receive a message like 9 1 /n and when the finger detach the Arduino would receive 9 0 /n.
The system has been made with some “security” measurements, where it’s a timer in place to shut off the vibration if loss of connection and measurements to track whether the message was a valid message meant for the Arduino.
Daniel:
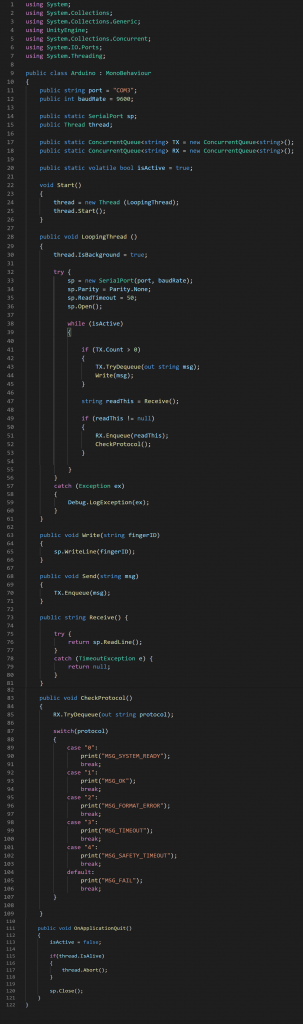
For this week I have updated the code I did for the serial controller in the previous week. Where I cleaned it up through such as PascalCase, clear naming and the removal of unecessary code. Switched from Queue.synchronized to ConcurrentQueue. Even though both are thread safe, the ConcurrentQueue is more modern and a bit faster (thanks Steven!). Furthermore, I also added some standarized protocols for the communication between the Arduino and Unity.
The serial controller program can be seen here:
I also bought some white gloves that can be detected by the Leap Motion. As well as write a little .ino program for the Arduino, which could be tested on the debug platform I built with LED lights. In order to test the scripts that were written for Unity application. A video for this can be seen here:
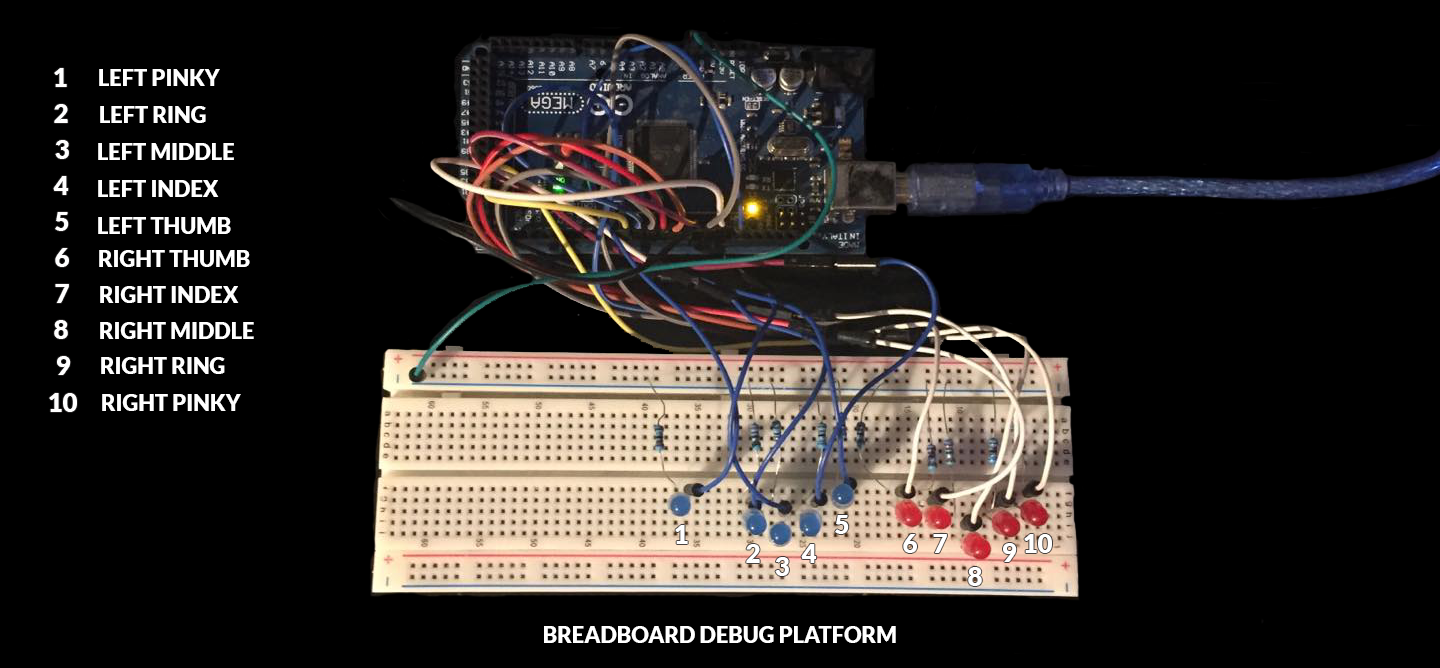{kind=link}
Out from the video it can be seen that the LED diode corresponding with the fingerID lights up once a collision on the finger is detected in Unity. As soon as the finger is removed, the LED diode is set to LOW.