Week 9
Mechanical
Jonas:
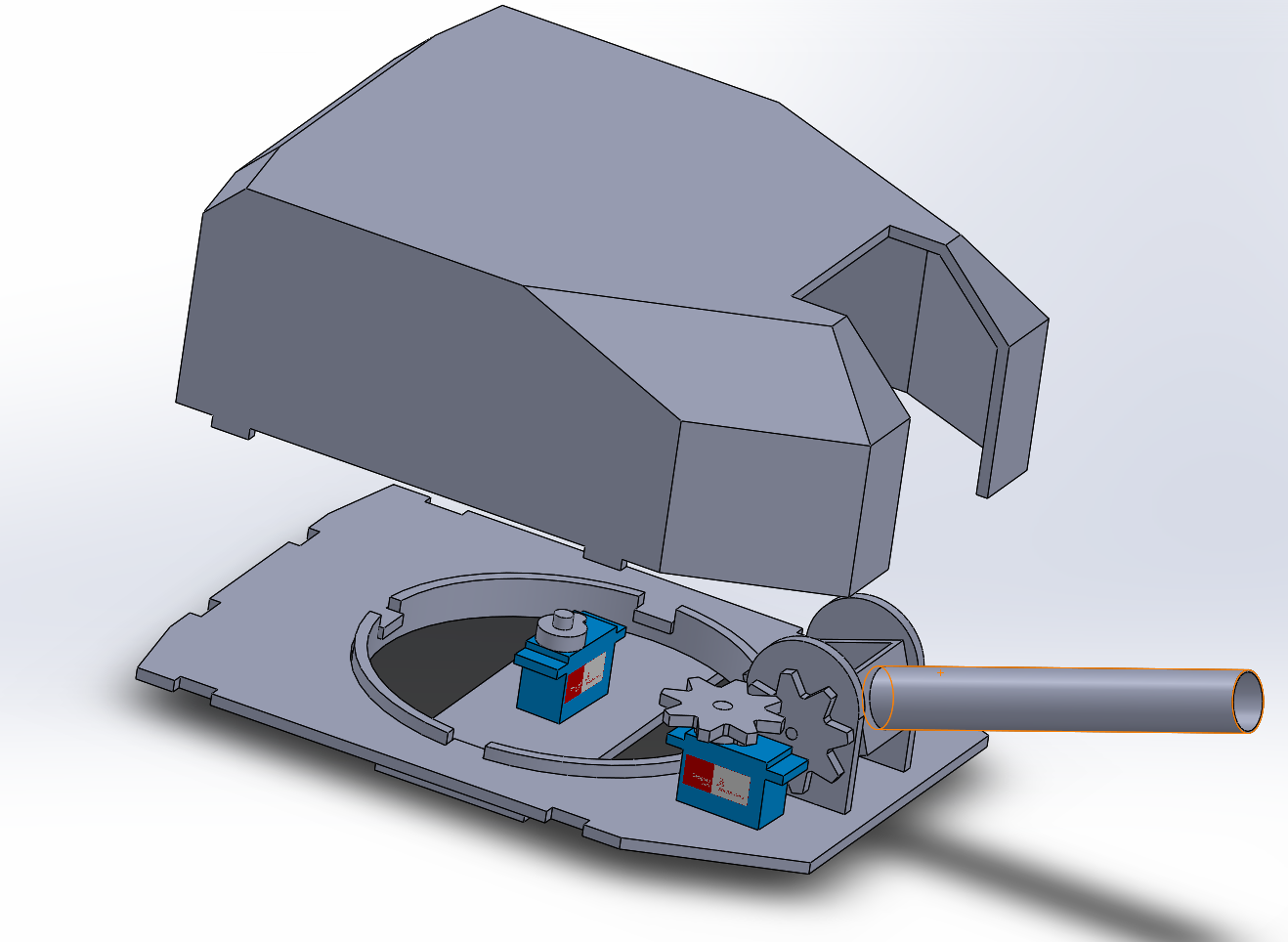
After deciding to go for the laser as our “firing mechanism” i designed a simple cog-wheel system to control the upwards motion of the cannon, and the sideways rotation of the tower. Needing only 2 stepper motors, there is a lot more room than what we initially thought, and so we now have the ability to customize the tower part more, or move non-location bound components up there.
Computer
Jensemann:
Week 8 & 9
After more discussion on how to get the fire and aim system to work with the camera detection system we decided it was best to make the fire and aim system function through raspberry pi rather than arduino as sending data between the two microcontrollers could prove difficult and unreliable. Therefore the last week was spent setting up the raspberry pi with the proper operating system and learning how to use it. Using RPi.GPIO i can control the pins on the raspberry pi in a similar fashion as on the arduino. The first hurdle doing it this way rather than on the arduino was a lower degree of control as the RPi.GPIO package uses a function called PWM (Pulse Width Moderator) to control the servos. The difference between controlling the servos on the arduino and on the raspberry pi is that on the arduino you can control how much the servo can move by 1 degree at the time, but on the raspberry pi, using PWM the servos are controlled with signal pulses, where the 50Hz servo will move to 0 degrees on a 0.5ms pulse, 90 degrees on a 1.5ms pulse and 180 degrees on a 2.5ms pulse. Using the raspberry pi we can still control the servos, but as much as with the arduino. Therefore this has to be the next goal, to control the servos just as well with the raspberry pi as I could with the arduino.
Kirisan:

This week I have worked with the logo of our tank.
I have also made a diagram looking sketch of our tank, where it shows the internal connections and placement of our components. This is one of the earliest iterations, where components are placed in the lower section in the tank. But changes will come, after we figure out what more components we need and how our prototype works. The sketch shows us a simple “overall” information of the internal of the tank. We have one problem with the battery placement. As we can see in the sketch, the battery is placed in the back, which is actually a wrong choice, because of the weight. But since this is one of the first iterations, we have decided to let the battery be in the back as it shows in the sketch, but in the next iterations I will change the placement so the weight is 50/50. For now, the plan i to place it in the middle, maybe above some of the components. But again, this will be decided when the prototype is 100% ready for testing. MD stands for Motor driver. There has not been any more improvements of the SONAR sensor, since it hasn’t been any priority right now. The backup of the openCV is still in progress.
Rahmat:
Worked with motion, face and upper body detection in this case I’m using haar feature based cascade classifier. This is an effective way for us to train our classifier with some negative and positive values. So as to train our own cascade classifier we need to try out and we need a lot of images. For us, it’s important to have high quality images of the object we want to recognize. Training a classifier takes a lot of time and a big number of samples and the key for us is just settle on the right quantity that gives us decent results. In our case we want to detect and recognize the face and if the images doesn’t contain the face then it’s a negative image. Classifier can be applied to a region of interest (ROI) in input images and ROI are samples inside a dataset recognized for a specific purpose.
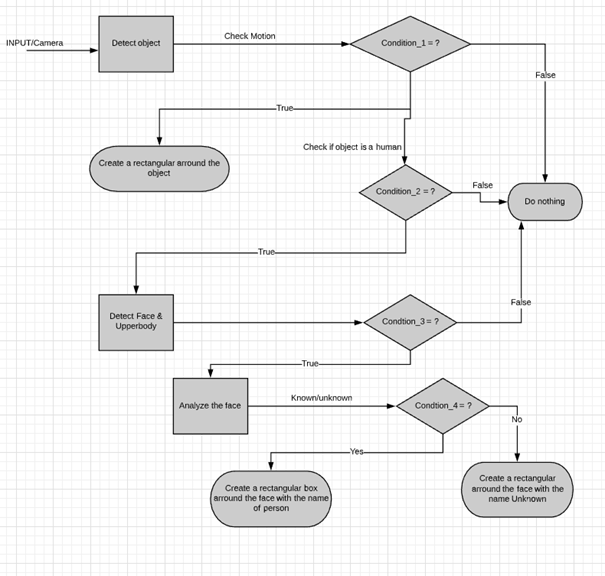
System flow chart