Petter
We’ve got a working solvable rubix cube.
Right now the colliders causing the movement are located inside the cube, I’m planning on adding a better way of triggering the actions soon, but this will allow us to test the system.
Daniel
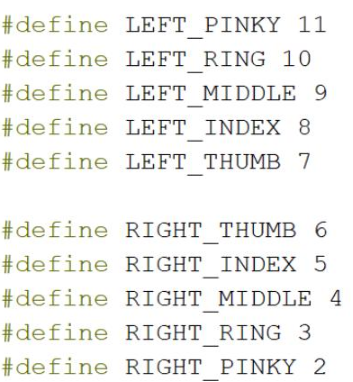
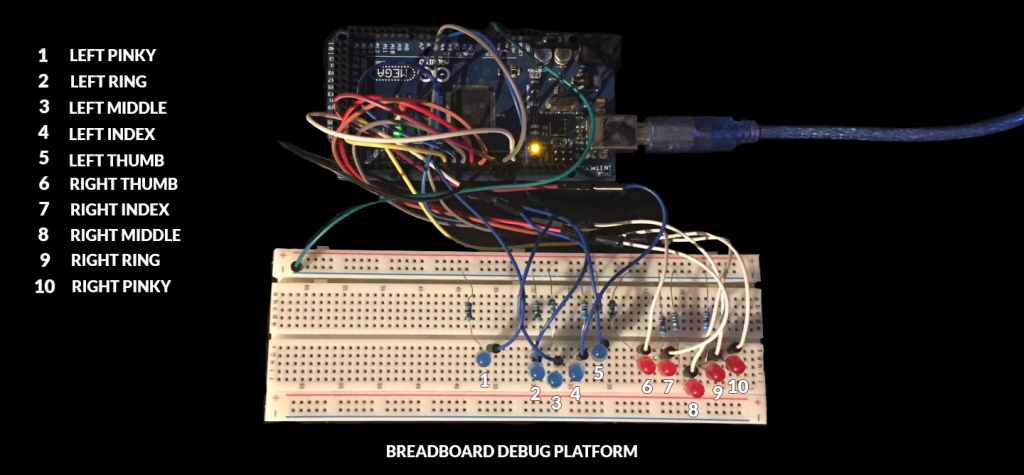
For this week I am working on connecting the Leap Motion device with Unity and an Arduino. I have managed to establish some sort of connection. Where I have also built some visualization tool with the Arduino. That through a layout with LED diodes, 5 for each hand. In this case, I’ve used blue LED diodes for the left hand and red ones for the right.

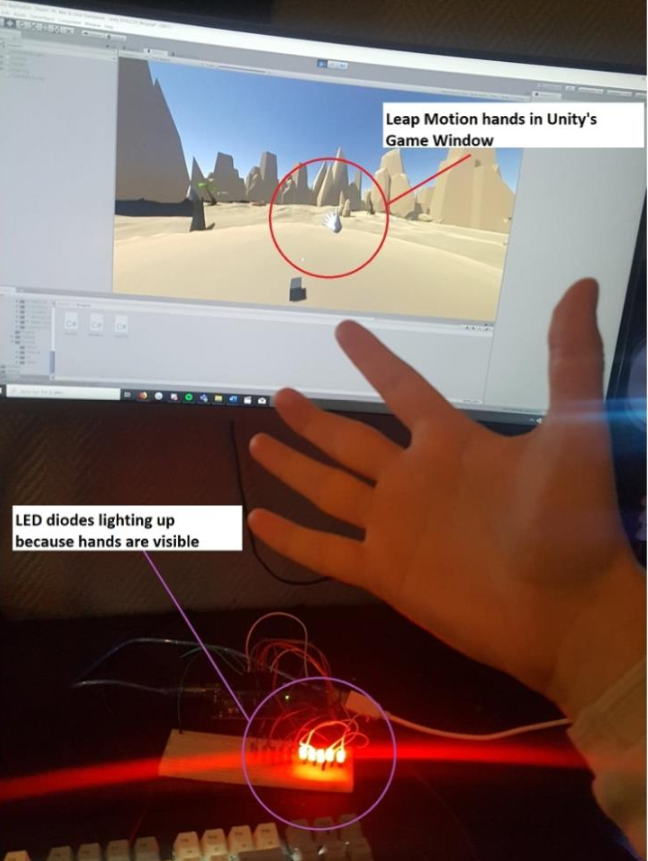
The images above displays how Unity and the Arduino responds when a hand is visible or not (for the Leap Motion). It’s real simple right now. With that all the LED diodes for the respective hand lights up once the hand is visible (see the hand in the Unity game window on screen). But, I am working on making the Unity script work in a way that it sends out information for all the fingers when it touches something (almost completed). E.g. if the left hand’s index finger touches something, then the second to last blue LED diode lights up.
It should then be possible to replace the LED diodes with the vibrating motors. Since the different fingers will already have been defined in the Arduino program.
Over the next week I will continue the contribution to both the Unity script(s) and Arduino program. For example, by looking at collision detection in regards to managing the different fingers in Unity with the Leap Motion. Which will include looking at bi-directional communication between the Arduino and the Unity application. Something which will also include looking into security. But not only that, I will also look at transforming the Arduino program into a master/slave setup. I have already managed to get a hang of 2 other Arduino’s, so I will try to connect these to the program.
Tom Eirik
Been working on design schematics for the circuits, and setting up the pin layout for the input out.
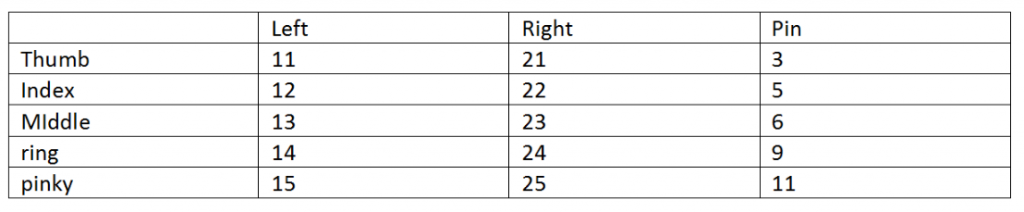
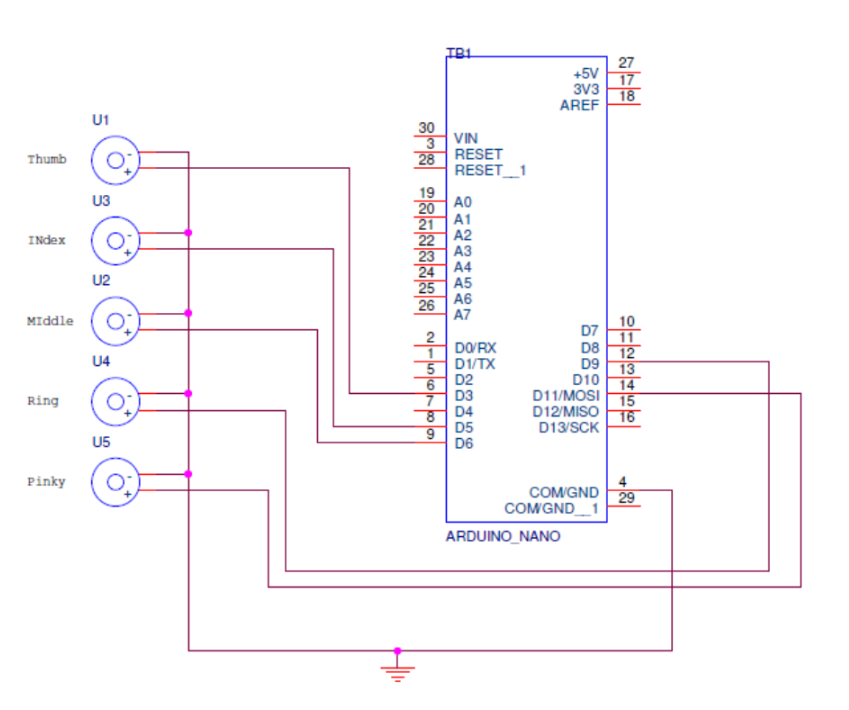
Left Right Pin
Thumb 11 21 3
Index 12 22 5
MIddle 13 23 6
ring 14 24 9
pinky 15 25 11
Examples of work which has been done this past week. Note that these are just rough sketches to get the ideas across, and progress the workflow.
Herman
Week 42 has gone to planing what componants that is going to controll the communication. For the wireless connection we are going to use micro controllers with a BLE integration, which has been ordered. In the meantime I have started to open for wired connection for the communication and will integrate the system with the interface when the micro controllers arrive