Week 6
Mechanical
This week started with 3D printing and testing a component in the suspension. This was required as we have to make sure the springs we have fit the design. After testing, we see that we have to adjust some dimensions as the model was slightly too large for the springs. After readjusting the components we plan to print all the necessary components for the suspension and assemble it as a subsystem. Where the entire subsystem can be removed from the main body if needed.
Secondly, this week included more research regarding the composite phase of the project. Since we have more experience in the subject, we realised how hard it is to properly form a product with composite sheets around sharp edges. We had initially planned to make the base form using laser cut planks, but that would involve a lot of sharp edges. Therefore, we have to have a mixture of 3D printed pieces and laser cut planks to allow for curved edges. This will reduce the degree of difficulty when using the composite sheets as well as time needed.
We also tested the bottom chassis with regard to required space for all electrical components and we believe our dimensions of 30x15cm will be sufficient for the tank. However, we cannot determine the height of the model until we have sorted out the shooting mechanism. We are yet to find a suitable airsoft pistol which will be a base for our mechanism and this will be our priority moving forward.
Lastly, minor adjustments were made to both the main model and the suspension model as a result of the readjustment of the tested suspension component.
Computer
We have worked with image gradient and canny edge detection. “The image gradient is a directional alteration in the intensity.” The processing image gradient is inside the image to find the edges inside an image. We are using the following methods in OpenCV such as Sobel X and Sobel Y and the final one is laplacian. To produce the required image we need to use different mathematical operations for these different image gradient. The Sobel X and Y method is joint Gaussian and differentiation operations whereas the laplacian calculating the laplacian derivatives. This image gradient is created from the original image and we using to draw out information from image. The example below show use the result of using the image gradient.

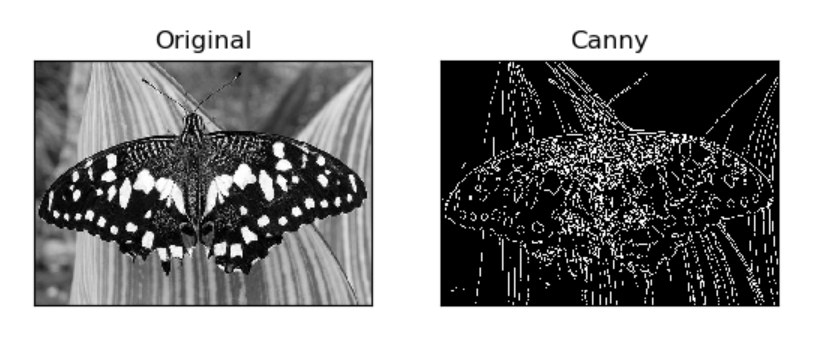
Canny edge detector is an edge detection that uses multistage algorithm to detect of a wide range of edges in an image. The process of canny edge detection algorithm can be done in the following steps: 1st we need to apply the Gaussian filter to remove noises from image and the 2nd step is to find the intensity gradients of the image. The 3rd step is to apply the non-maximum suppression to get rid of spurious and the 4th step is that we need to apply double threshold to determine potential and the last step is to track edges by hysteresis that is to finalize the detection of edges. The benefit of this method is that it will help use to remove noise from image. To compare this method with the image gradient we can clearly see the distinct between them. The example show use the result of canny edge detection.
Fire and aim system has moved to programming from arduino’s IDE over to python using pySerial and Arduino-python3. At this point, the fire and aim system is getting clearer so we’re currently figuring out how the camera detection will send data over to this system. The concept mentioned in the earlier weeks has not changed, so at this point working out the solution is the next step. Afterwards the next hurdle will likely be adjusting the values so that the system aims well.