Week 5
Mechanical
We started off this week by dividing the workload into two. One worked on remodelling the tank in a way which can be laser cut as we were not satisfied with our initial design. This model will be used as a base for making the composite version.The other worked with altering and experimenting with the suspension system and track subsystem we plan to have.
Suspension and Track
We had initially drawn some ideas on how we would approach and the drawings we made last week were hypothetical as we had no real numbers to go off of apart from the dimensions of the tank itself. However, this week we have purchased springs which we believe will be sufficient for the system and have therefore been able to properly model the suspension system with regard to the springs dimensions. As one of our initial restrictions of the belts dimensions limiting the size of the tank is now gone, we can adjust the belt with regard to the tank which I believe is much more optimal.
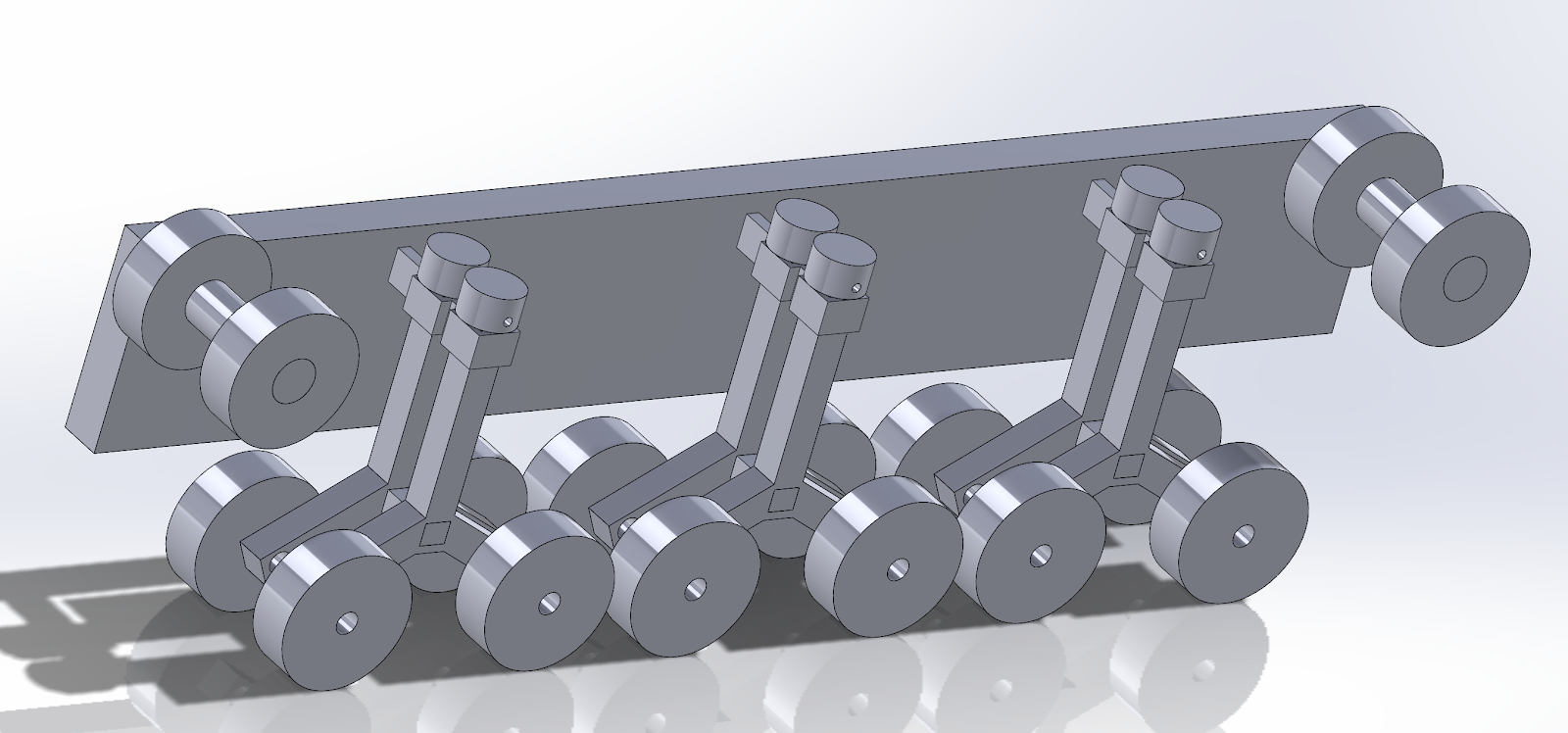
This is what we believe the overall track subsystem will look like. The two outermost wheels deliver the power with individual motors and the bottom twelve are connected to the suspension.
We will be 3D printing and laser cutting the parts needed to test this next week and attempt to make a working model before making the hull out of composite.
Main body and Tower
The main body`s design will resemble a modern Abrahams tank with it`s center positioned and long/wide tower. As previously mentioned, we did a remodel of it in order to be able to 3d print/laser cut it.

This is essentially what are aiming for, but since the chamfer function is heavily used and the amount of surfaces is quite high, it proved impossible to make with a laser cutter and too time consuming to make with a 3d printer considering it’s going to be a mold for a composite version anyways.
In order to visually complete the wheel and suspension system we also need to model an overhang connected to each side to act as protection and also further reassemble the design goal of a modern tank. This part can most likely be glued onto the main body as the bottom wheels with suspension won’t be attached, and the top ones are connected to the motors.
We now also have a good idea of how much wiring will be needed in order to perform the main functions of this vehicle and it will require a lot of precise cable management and planning in order to have a sufficient distance between the mechanical parts and the electrical ones.
Computer
The aim and fire system is supposed to handle the data received from the camera detection system. Therefore, since the camera detection system will be written in python to replicate the data received a UI created in python had to be created. By using this UI, we can imitate the kind of data the aim and fire system would receive from the camera detection system. The concept is to use this UI to further refine how to servos behave until the system works as intended, and by the time the camera detection is complete, the work of making these two different systems work together easier.
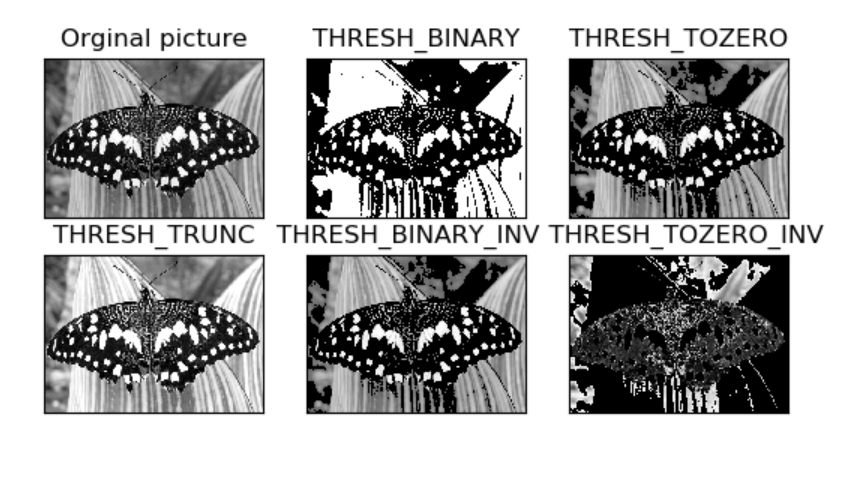
In this is week we have worked with thresholding segmentation on images with the purpose of “how to separate objects from its background”. This process involves comparing each pixel of an image with the predefined threshold value and each pixel of an image to threshold value divides all the pixels of the input image into two groups. The first group will include the pixels having an intensity value lower than threshold value and the second group is the opposite of the first group. We are using the thresholding technique which are available in OpenCV. How we can use it is that we give different value to pixels to separate object from its background.
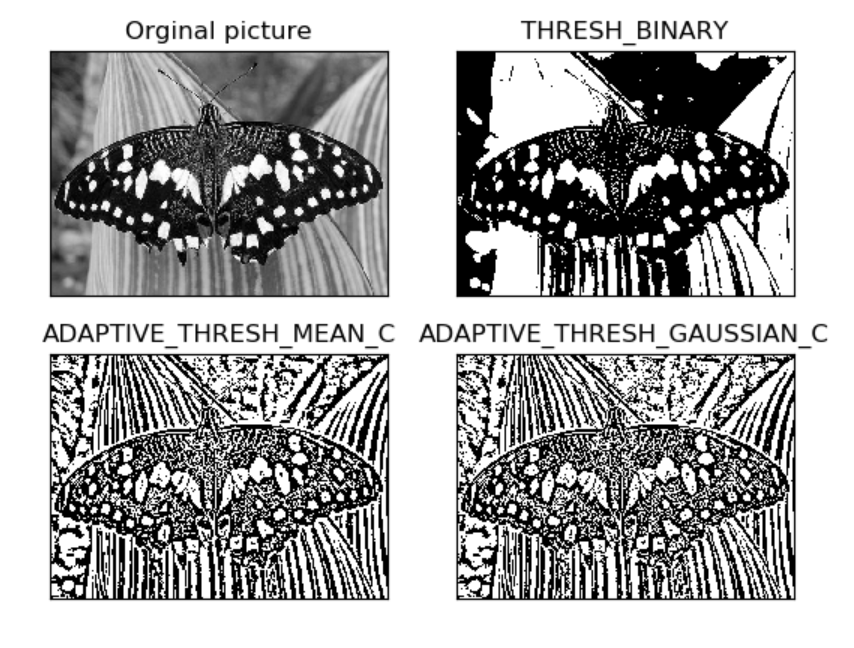
The example above shows how the simple thresholding works on images but there is other thresholding that is more powerful to use. The other method is adaptive thresholding that is available on OpenCV where it allows us to calculate for the smaller region so the threshold is not global for every pixels. For smaller and different region we need to calculate different values. The use of a simple threshold is not a good idea for all the conditions, because the images has different lighting conditions in different regions and therefore we need to use adaptive thresholding on those cases. The example below show us the result of using adaptive threshold.