During this week the computer students continued working on the detection of the pieces and doing research on how to use OpenCV. The electrical students have been working on designing the system and started looking at the motor system the chessboard needs.
Helge Sondre Ulberg:
This week i worked on the pointcloud for the detection of the chess pieces, and test the plugin with unity. I found the plugin through intel’s site and through github. Where i downloaded the plugin and tested it with the 3D camera. Next week I will try to understand the software better and hopefully manage to recognize something with the camera. So it can be later used as detection for the chess board.
Ole Henrik Flesaker
Today I have been researching further into Unity and OpenCV. The current goal would be to create a live shape detector with a webcam. Currently I have used the sample code for the shape detector “OpenCV Plus Unity” provided by Unity’s asset store, combined a code for a camera in Unity but they are currently not working together. The biggest problem currently is reading and writing on the live feed.
Sondre Fuhre Orsten
This week I have partly been trying to find a way to make OpenSource software communicate with an external chessboard. This idea has been scrapped for now, so I have started making a functioning chess game in unity and use this as our interface. So far the grids are made, each square is identifiable and the pieces are added through assetstore. Making it in unity will make it easier to implement with our chessboard. But it will potentially be harder to integrate a chess engine to it.
Oriana Presacan
During last week I have been trying to understand how OpenCv works. I only managed to make it recognize a certain color with the webcam.
Osmar Ferreira de Freitas
This week I contacted Dag, Richard and Joakim to see the availability of materials that we would need to make our project. Stian and I worked in the chess pieces models and decided that the pieces would be “normal” pieces with a removable base in case we need it for the computer vision software. We also discussed with Richard the best way of our electromagnet to move under the board and it was decided that we should have a step motor to each axis, moving in tubular rails, instead of a CORE[X,Y] implementation. We also made a list of materials that we should buy this week for further development of the project.
I hope to finish the modeling and the project itself of the physical parts this week so I could focus more on the motor management.
Stian Bergstrøm
This week I have been continue working on 3D design in Fusion 360. The chess pieces have gotten some bases that is supposed to be able to take on and off. We have designed this in case we are going to use shape detection to detect the pieces.

I have created a initial design for the axis system after discussing what the best system would be. The idea as Osmar said is to have one motor on each axis. In the design we need to find how to connect the motors to each axis.
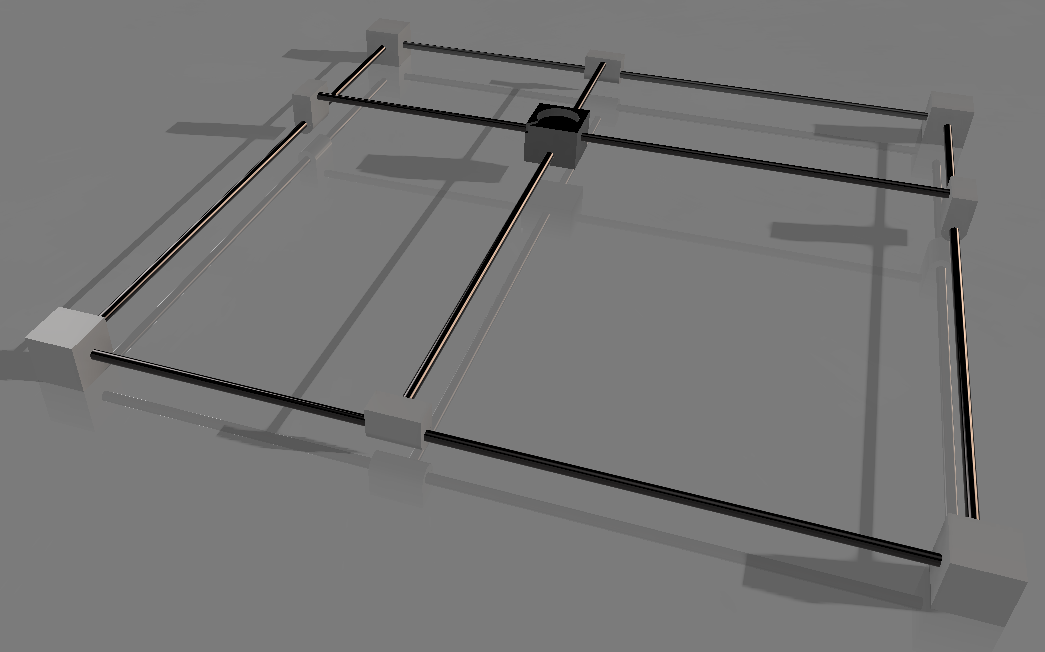
I have also started looking at the motors and the motor drivers. The stepper drivers that we have is the a4988. With the use off an arduino and the stepper driver I was able to verify that they worked as intended when connecting the NEMA 17 stepper motors. In the end of the week I have been able to start printing out the chess pieces. For this week we have been able to print out 4 pawns and are continuing with the printing next week
