Group Members:
- Jens Paulsen (Data)
- Rahmat Mozafari (Data)
- Arpan Sharma (Data)
- Kirisan Manivannan (Data)
- Adithya Arun (Maskin)
- Jonas Lium (Maskin)
As a group we agreed on choosing a project that we can have fun with. We began the first session by brainstorming for ideas.
Our initial ideas were as follows:
- A submarine that maps rocks and other surfaces of walls by popular swimming locations to mark which areas are safe to jump off and which are not.
- An autonomous tank which can target a person and follow them.
- An air balloon which can guide people to their rooms in krona.
- A drink mixer for parties
- A portable party box with all the necessities
- Amphibious car
We had all agreed on the submarine to begin with but after talking to the teachers we were advised not to proceed with the idea as testing and demonstrating at school were not possible. Therefore we considered the other ideas.
- The party box and the drink mixer were opted out due to relatively easy mechanical aspects which we didn’t find enjoyable.
- The amphibious car was voted out due to the same issue as the submarine with testing and demonstrating at school
- The air balloon was voted out due to lack of freedom to expand the mechanical aspect due to weight restrictions.
Our three main criteria when considering ideas are as follows:
- The project must be doable but challenging for both computer and mechanical group members.
- The project should have a degree of freedom to allow us to either expand or simplify the specifications with regard to time
- The idea should be fun for the group members which will bring about better motivation to work on the project amongst group members.
We therefore decided to proceed with the tank. We had voted out the other initial ideas and the tank meets the three criteria we used to evaluate ideas. It can be as complex or as simple as we want it to be.
After deciding on the tank, we proceeded to draft a set of requirements and specifications. The requirements were divided into A,B,C where A has the highest priority and includes functions which are crucial to the functionality of the product. Specifications are functions or system capabilities which we can measure and test post production.
The requirements for our system are as follows:
A
- The tank must accelerate and decelerate
- The tank must have autonomous driving capabilities
- The tank must be capable of braking
- The tank should turn
- The hull should withstand collisions with objects
- The battery must be strong enough to power the components
- The tank should be able to be controlled manually using a controller.
B
- The tank can have suspension
- The tank must shoot pellets
- The turret should be capable of aiming along the X axis aiming
- The system can target a person or object and follow said target
C
- The turret can be capable of Y axis aiming
- Aesthetics of the tank to make it more realistic
- Solar panels for recharging
- A Winch for towing purposes or in case it gets stuck
- Patrol mode (Guard a certain area: Doorway)
Specifications (Subject to change)
- Tank can drive at 4km/t
- Tank can shoot projectiles upto 3m
- Tank can detect objects around it upto 30cm
- The tank can drive up an incline of 30 degrees
- The tank shall have a transmitting/receiving range of 25m
- Tank must be able to turn 360 degrees while holding position.
- Tank must weight under 2.5kg
- Turret should be able to turn 90 degrees in each direction
- Projectile should be accurate within 2m (+-10cm)
Mechanical
We began by discussing possible dimensions and researching parts we need for this. We ended up using a 30cm x 15cm x 10 cm as a starting point for our tank. Initially we were simply sketching ideas and looking for inspiration. We made a list of features or functions or aspects we have to consider when designing the tank.
These were:
- Caterpillar tracks
- Suspension
- A body with enough space for components
- Weight and weight distribution
- X axis aiming
- Y axis aiming
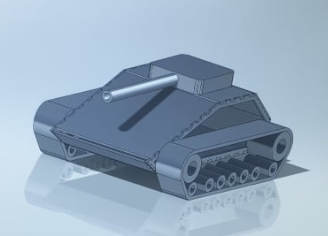
We started off with the model shown above to estimate available space for components and size needed for other components such as gears and axles.
We plan to make everything except the belt, motors and electrical components from scratch. Regarding the shooting mechanism we are considering using parts from an airsoft gun.
Computer
We have done a lot of research of different solutions and inspirations to start this project. Correct components and quality are two important factors to get the complexity of this product. The first week has been used for discussions and collaboration between the interdisciplinary co-workers in the group, so we can decide how we are going to program and develop the product. The pre-planning phase in the first week has been very important for us, to find the right circuit and components. The reason for this pre-planning phase is to get several viewpoints and inspirations to fulfill those requirements.
For the programming part of the project we tested components we’re going to use, and read up on their functions. We have spend a couple of days to read up their functions and bevarior, since we do not have any electrical engineers in our group. This means, that we need to do some ground work in the electrical part and improvise sometimes, so we know exactly what is going on. We have also tried to distribute tasks between us computer engineers, where we will have focus in different tasks. But we will also get these tasks together to see what can be changed, and to make sure that everyone is on the same pitch. After a week, the plan is to collaborate about these tasks so everyone will have a role in every computer tasks. We think this is a good solution in the start phase, just to get things done right. But afterward we need to put these tasks together so every operations will be executed from the same circuit and product.
Below is a black box diagram showing what inputs we’re expecting the system to have and what outputs we wish to produce through our programming.
