Hallo!!
Den siste tiden har vi fokusert mer på å få til at Raspberry Pi’en kan bygge og kjøre OpenCV og densalgs. Vi har også jobbet videre med å finne en måte å få informasjon fra Raspberry Pi’en over på Adurinoen. I tillegg har vi også jobbet videre med bildegjenkjenning.
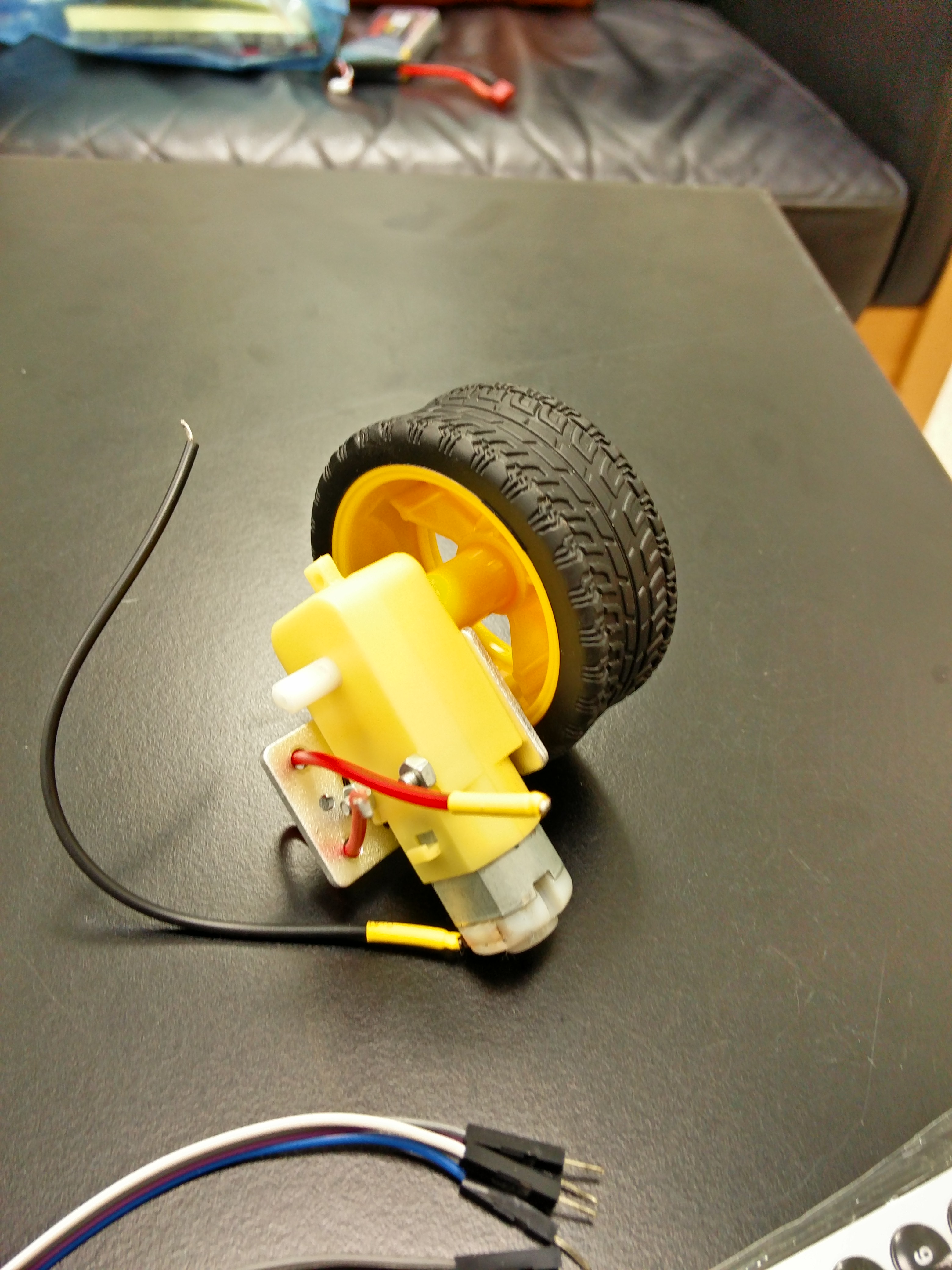
Så viste det seg at en av motorene til hjulene hadde en løs kabel. Vi løste dette med å bytte ut motoren.
Videre har vi enda en drivetest av bilen.
De forskjellige motorene trengte forskjellig kraft på hver av dem for å gå rett, bilen lente for det meste til høyre. Vi har da fått til en løsning slik at den ikke lenger gjør dette. Det ble også programert inn en 180 graders rotasjon.