I dag fikk vi sjenketuter, solenoid ventiler og wifi-shield som vi har ventet på en stund. Vi jobbet videre med koden til roboten, og har nå fått denne til å virke som ønsket ved at den får en oppgitt avstand, og kjører til denne.
Siden vi fikk WiFi – modulen vår, fikk vi jobbet videre med denne koden og optimalisert den. Det ser også ut som at denne koden virker slik vi ønsker.
Vi hadde håpet å starte å bygge selve konstruksjonen, men har ikke sag osv som vi trenger tilgjengelig, så vi fikk ikke startet på dette.
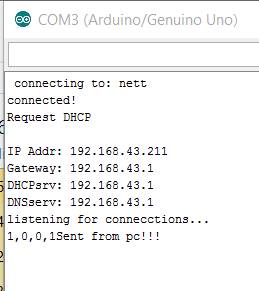
Nedenfor ser vi at arduinoen mottar kommando fra pc’en via wifi.
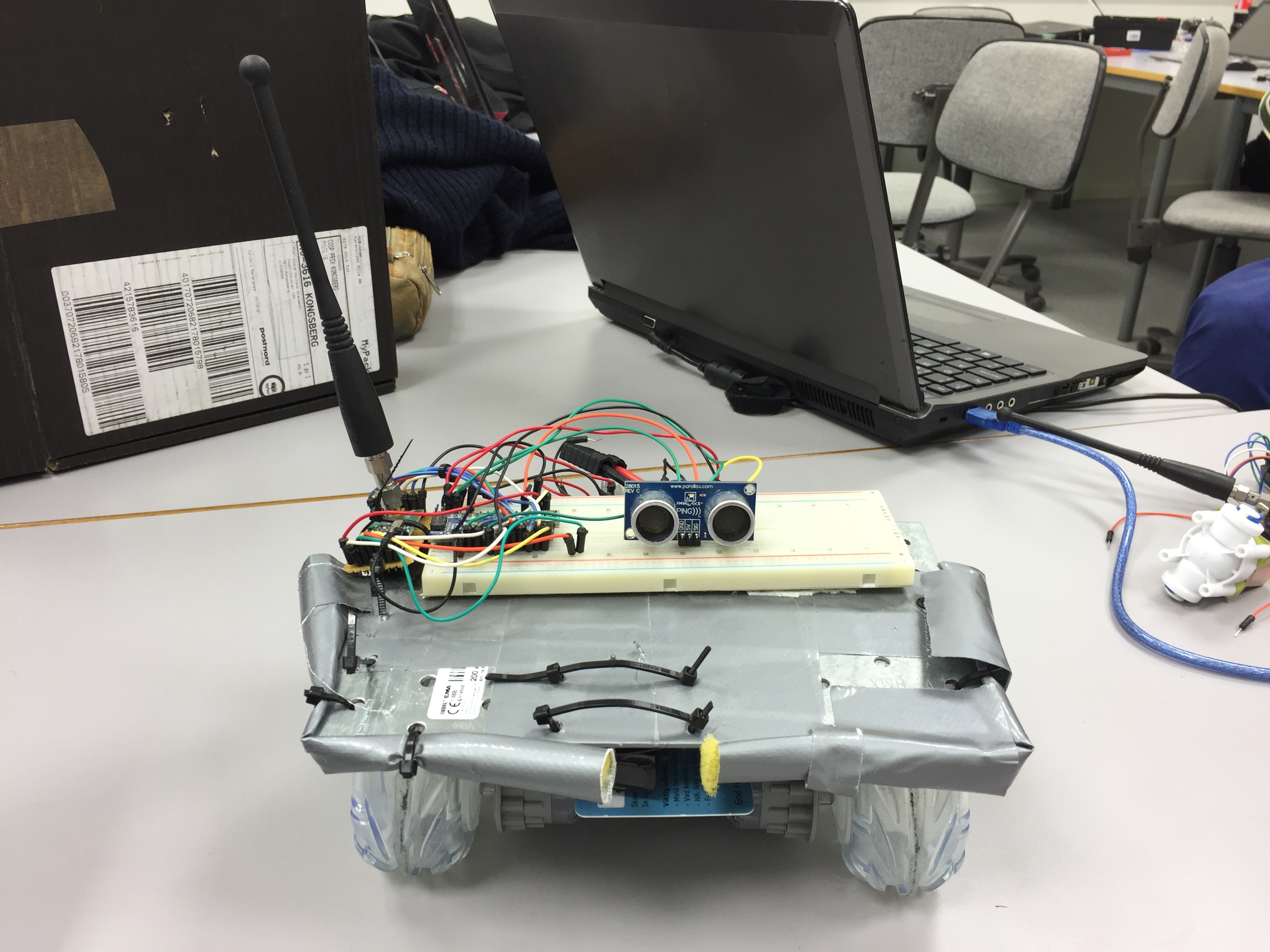
Bilder av roboten som skal kjøre frem og tilbake under drinkmikseren med glasset:
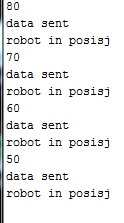
Linken nedenfor viser film av testkjøring av roboten hvor den får kommando om plassering, og kjører til denne. Bildet nedenfor viser responsen roboten sender tilbake.
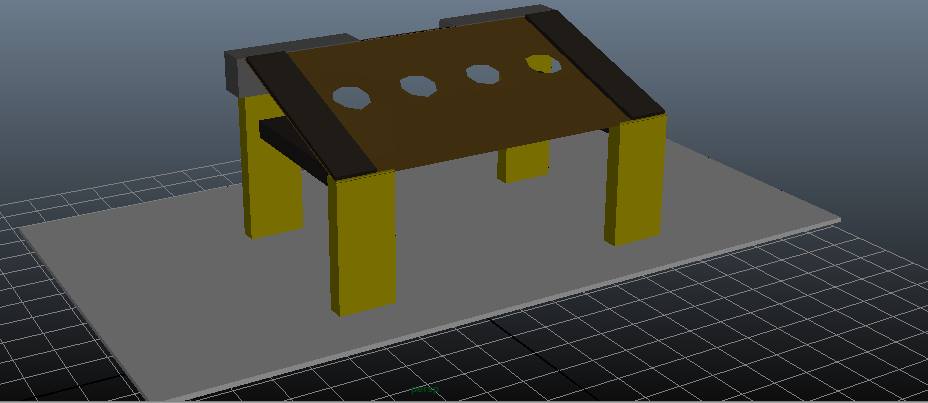
3D modell av konstruksjonen: