Spider Manufacturers (Maskin):
Denne uken har Spider Manufactures jobbet med FEA og montering av komponenter.
Creepy Coders (Data):
Mye pønsking på invers kinematikk denne uken. Dette er ikke i boks enda. Men, utviklingen av backupløsningen vår har fremgang! Didrik ordnet rotasjon med bruk av de predefinerte bevegelsene vi har i Leg klassen.
Individuelle innlegg
Ole Martin:
Denne uken har jeg fått gjort mindre enn vanlig, da mye av tiden har gått med til eksamensforberedelser i Produkt 2. Vinay og jeg har imidlertid montert den nye batteriholderen, som bidrar til å øke avstanden mellom gulvet og robotens kropp. For å få dette på plass, gjorde vi noen justeringer på komponentholderplaten. Vi boret nye hull med nedsenk for å feste holderen og laget hull for kablene til midtservoen som styrer de midtre bena. Den nye batteriholderen dekker den tidligere føringsveien for disse kablene.
Se bilder i Vinays blogginnlegg for mer detaljer.
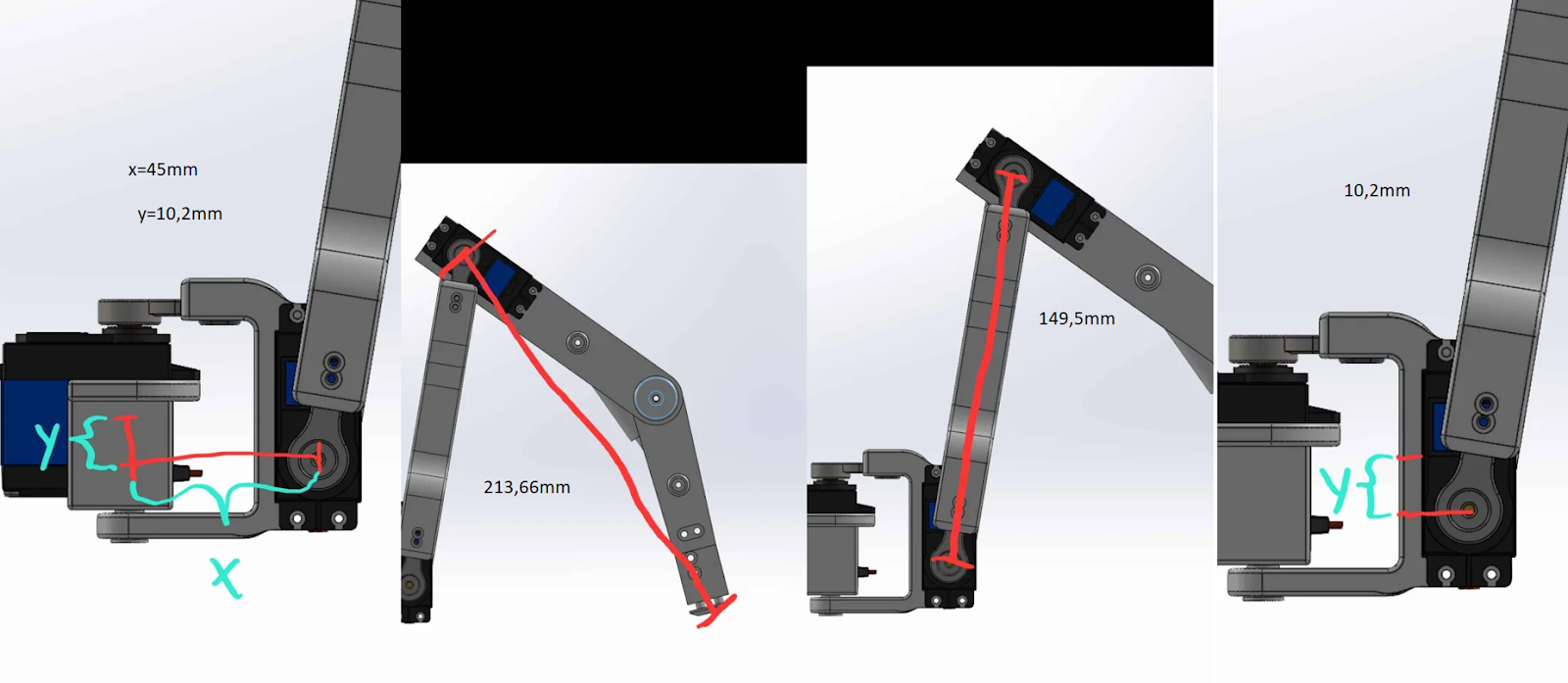
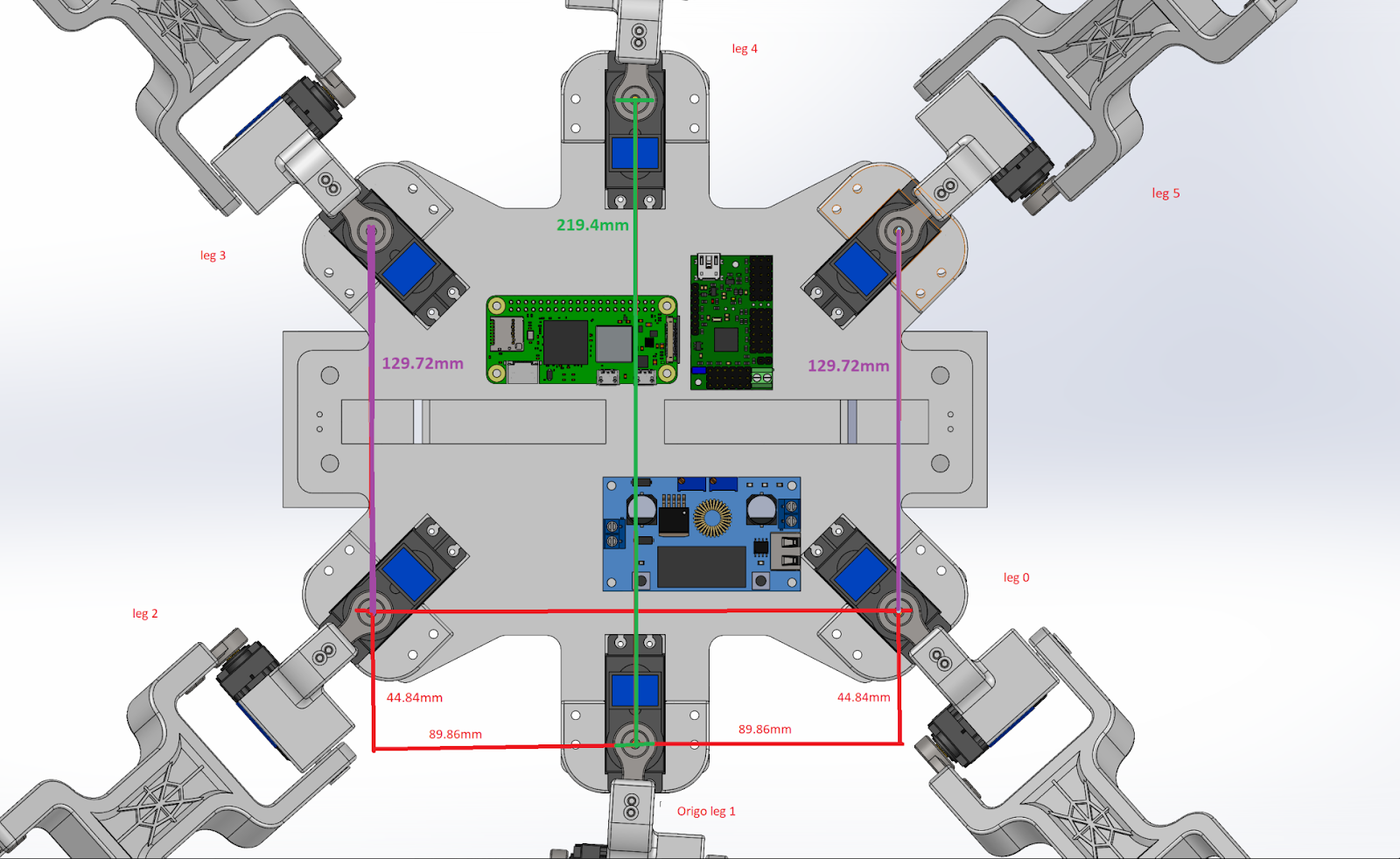
I tillegg har jeg hjulpet Martin med å kartlegge lengden på de bevegelige leddene og laget et grunnlag for et koordinatsystem, som han vil bygge videre på i robotens kode.
Vinay:
Denne uken har jeg produsert ferdig den nye batteriholderen og montert denne med Ole Martin.
Her er bilder av da vi monterte batteriholderen.
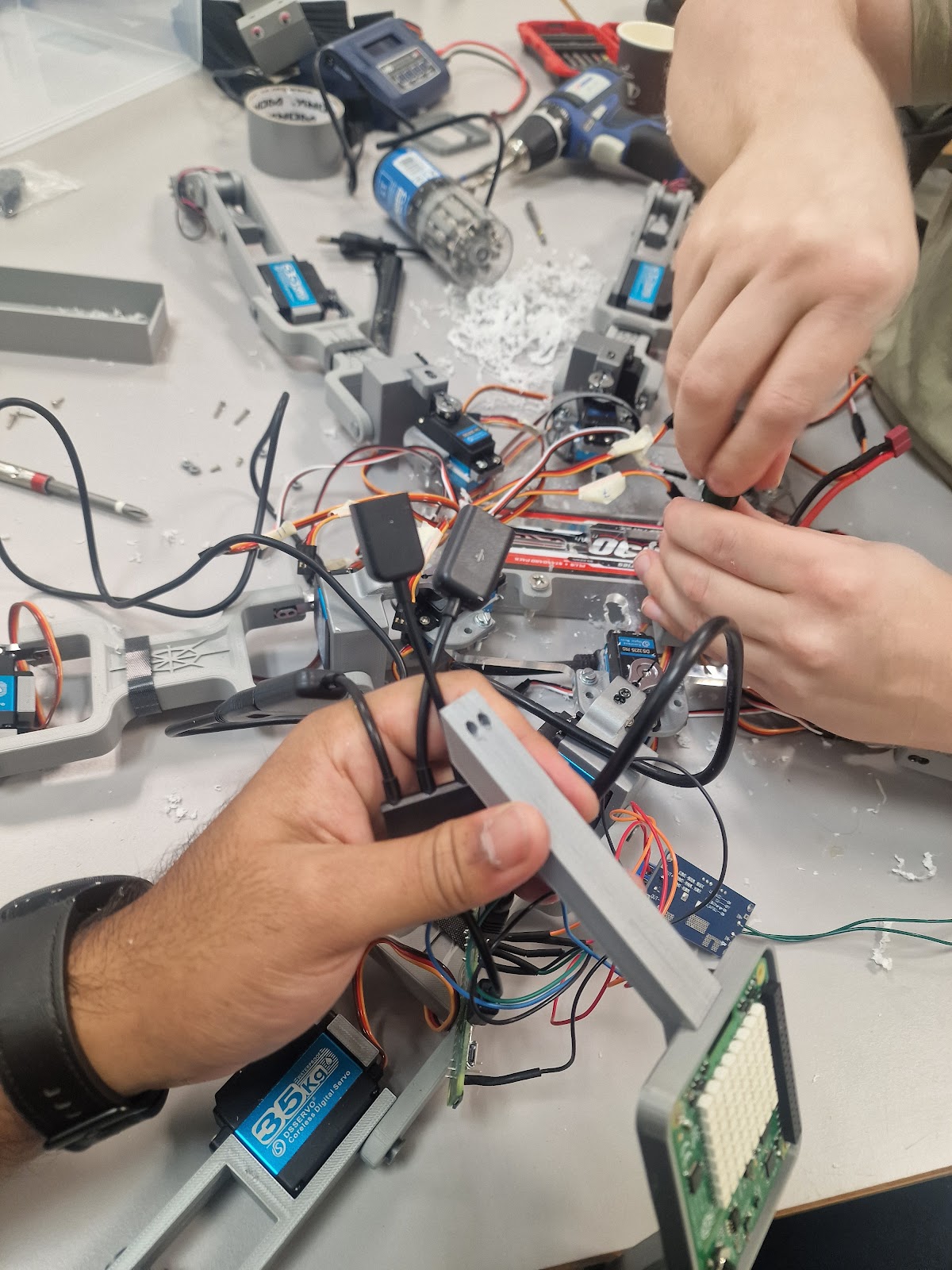
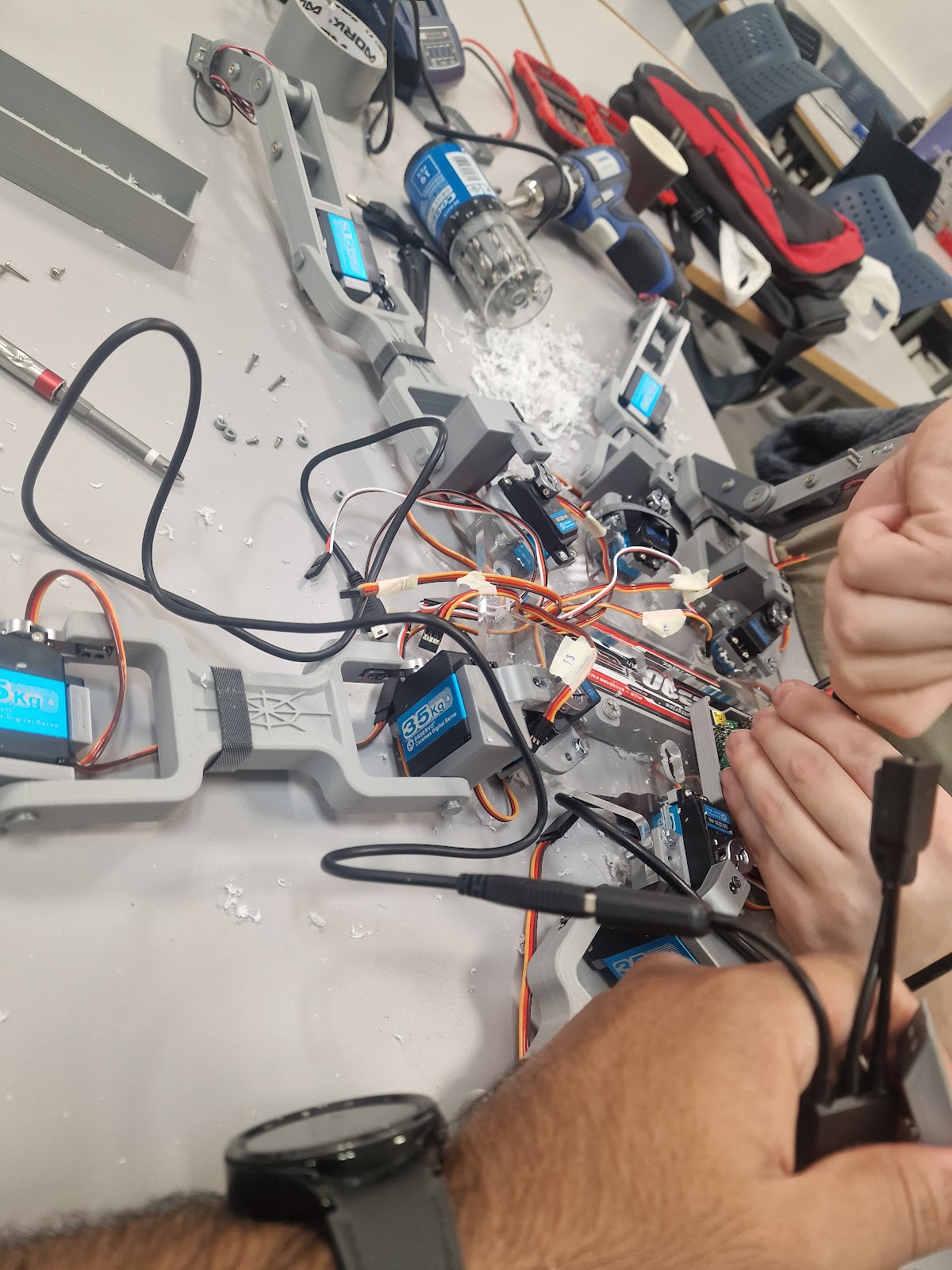
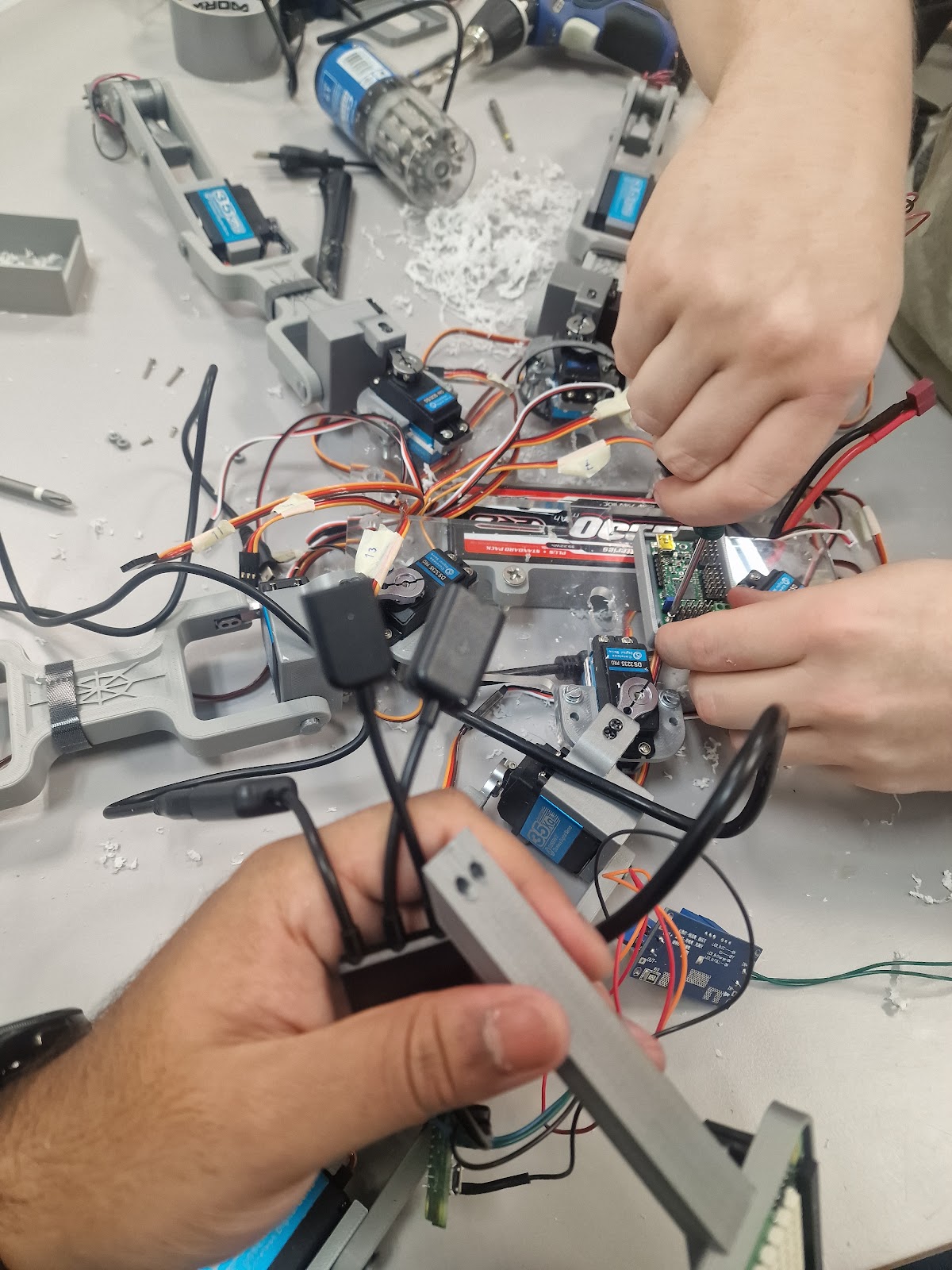
Vi brukte litt lengre monteringstid enn forventet grunnet litt justeringer og rydding i kablene. I 3D modellen hadde jeg tatt i betraktning 6mm hull på festhull på batteriholderen, slik at vi kunne bruke noen skruer som vi allerede hadde disponibelt. Jeg glemte derimot å ta med meg skiver som passer til disse skruene, men vi kan enkelt få på plass disse skivene seinere og er ikke kritisk til testingen. Klaringen har nå økt med ca. 20mm, noe som er bra for Creepy Coders når de koder.
I tillegg til montering av batteriholderen har jeg utført en FEA, som tar for seg batteriholderen:
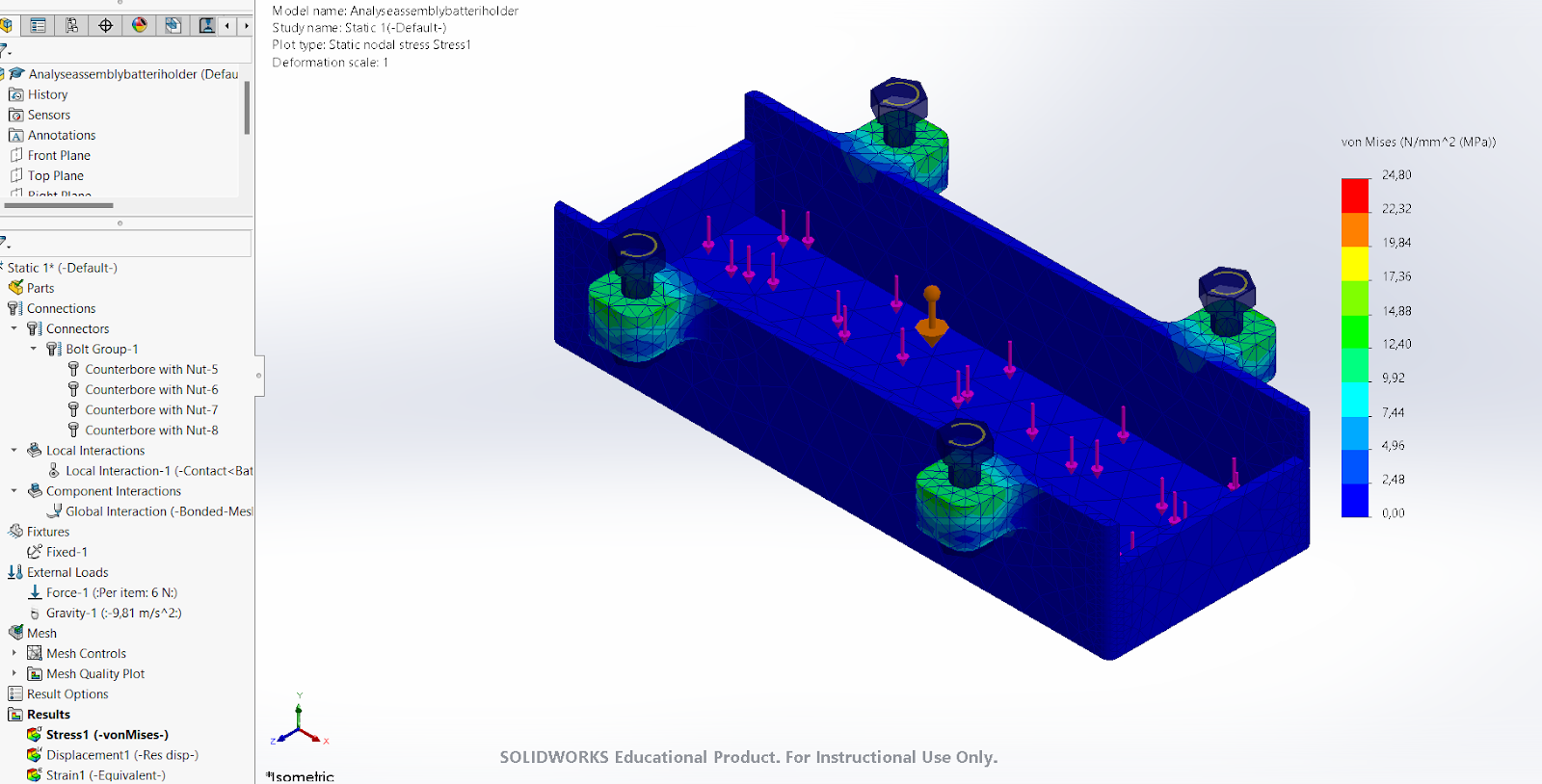
Resultatet viser en stress på ca. 25 MPa. I analysen har jeg en kraft som tilsvarer 2 ganger batterivekten samtidig som jeg har med gravitasjonskraft. I tillegg har jeg satt en finere mesh i skruehullene, da dette området er mest utsatt.
Kristian:
Denne uka har all energien min gått til eksamensøving.
Martin:
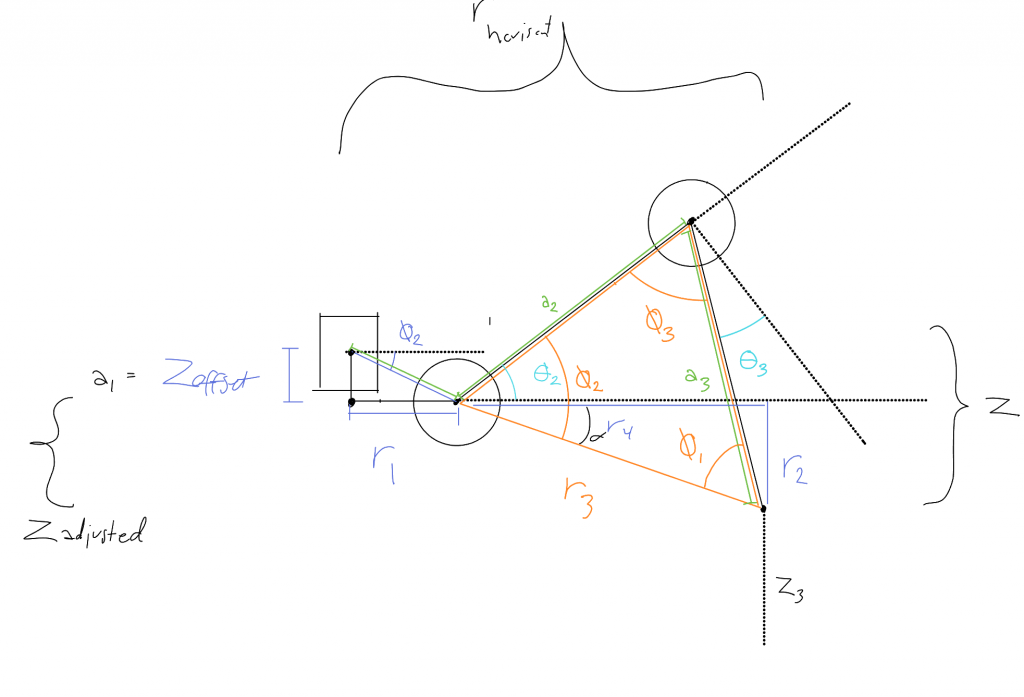
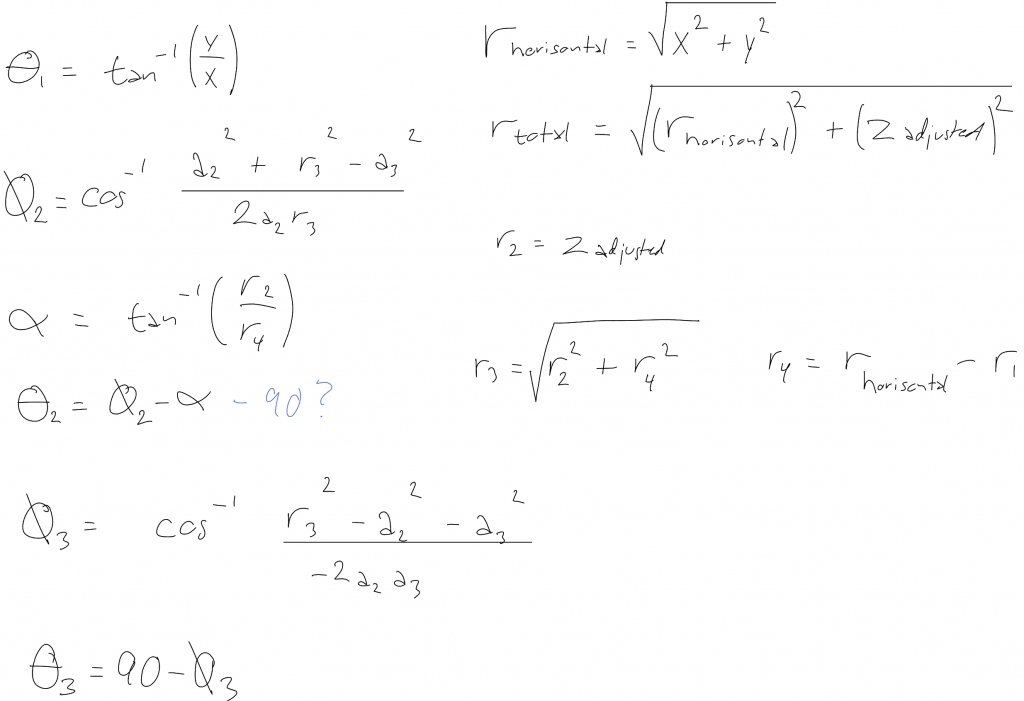
Hovedfokuset mitt har ligget på å finne ut av matematikken bak invers kinematikk og å få oversatt dette til kode. Enn så lenge har dette vært en smertefull reise. Jeg har testet det i kode også, men det er et eller annet jeg har oversett. Kort innlegg fra min side pga tidsklemme akkurat nå. Men, jeg er sikker på at jeg skal løse denne gåten!
Ida:
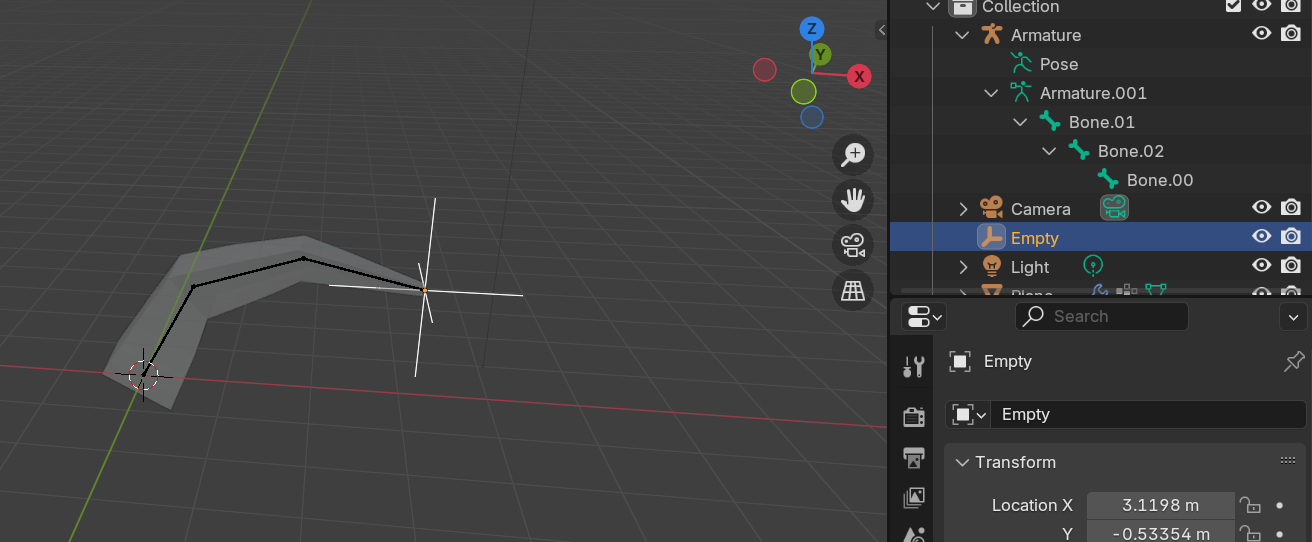
Denne uka valgte jeg å fortsette simuleringen i Blender istedet for Unity, da det var et enklere program for å håndtere kompleksiteten med benstruktur og invers kinematikk. Jeg startet med å lage en modell for ett ben og å få dette til å kunne bevege seg realistisk. Etter oppsett av IK fokuserte jeg på å få benet til å bevege seg i et kontrollert mønster, noe som er avgjørende for å få til et flytende ganglag i simuleringen. Da det ene benet fungerte som ønsket, så laget jeg resten av bena. Deretter satte jeg opp de ulike mønstrene slik at bena ikke kolliderte i hverandre. Til slutt jobbet jeg med å lage et gangmønster som skal kunne simulere et naturlig ganglag for edderkoppen.
Videre vil jeg finjustere gangmønsteret og utføre litt stabiliseringstesting, deretter se på muligheten for å implementere sensorer til navigasjon.
Didrik:
Denne uken så har vi konstruert et roterende venstre og roterte høyre ganglag som lar roboten rotere. Videre så har Martin gjort framskritt mot den inverse kinomatikken, men vi så at gradene ikke var helt presise enn vi tilslo så jeg har begynt å nok en gang kalibrere servoene slik at vår position_to_angle funksjon er tilnærmet nøyaktig.
Framgangsmåten kommer til å være at man tar bilde av armen i forskjellige angles og ser på nøyaktigheten av graden. Så gjør jeg endringer i json filen slik at graden matcher.
Bjørn Ole:
Denne uka har det ikke blitt gjort så mye fra min side. Avslutningen i gruppearbeid i Sanntidssystemer har tatt mye av min tid.
Jeg har kuttet en ny bunnplate til edderkoppen med 7cm ekstra, slik at vi ved behov kan bytte for å få mer avstand mellom beina.