Spider Manufacturers (Maskin):
Denne uken har Spider Manufacturs jobbet med å forbedre 3D-modellen, i tillegg startet å kjøre ulike analyser(FEM) på modellen, produsert komponenter og montert.
Creepy Coders (Data):
Basen til koden vår begynner å ta form. Vi har sittet timesvis med å teste posisjoner og bevegelser og vi har blitt rimelig kjappe til å nappe ut strømmen da det går galt!
Ukens highlight er at vi stablet oss på beina!
Individuelle innlegg
Ole Martin:
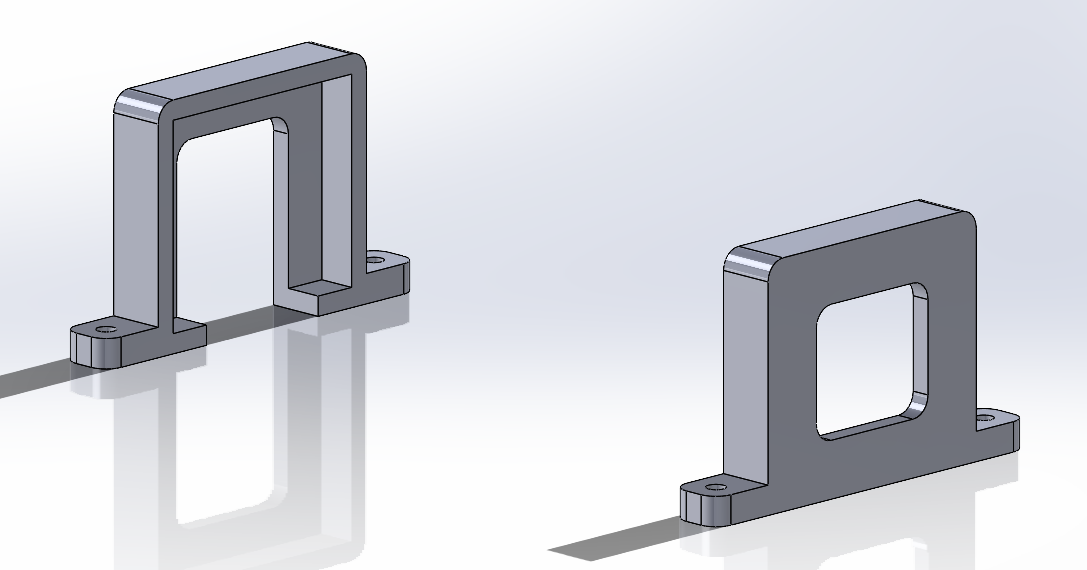
En ny uke har passert, og jeg har produsert holderen til Raspberry Pi Sense HAT og spacere til komponentholdere, som Vinay har montert.
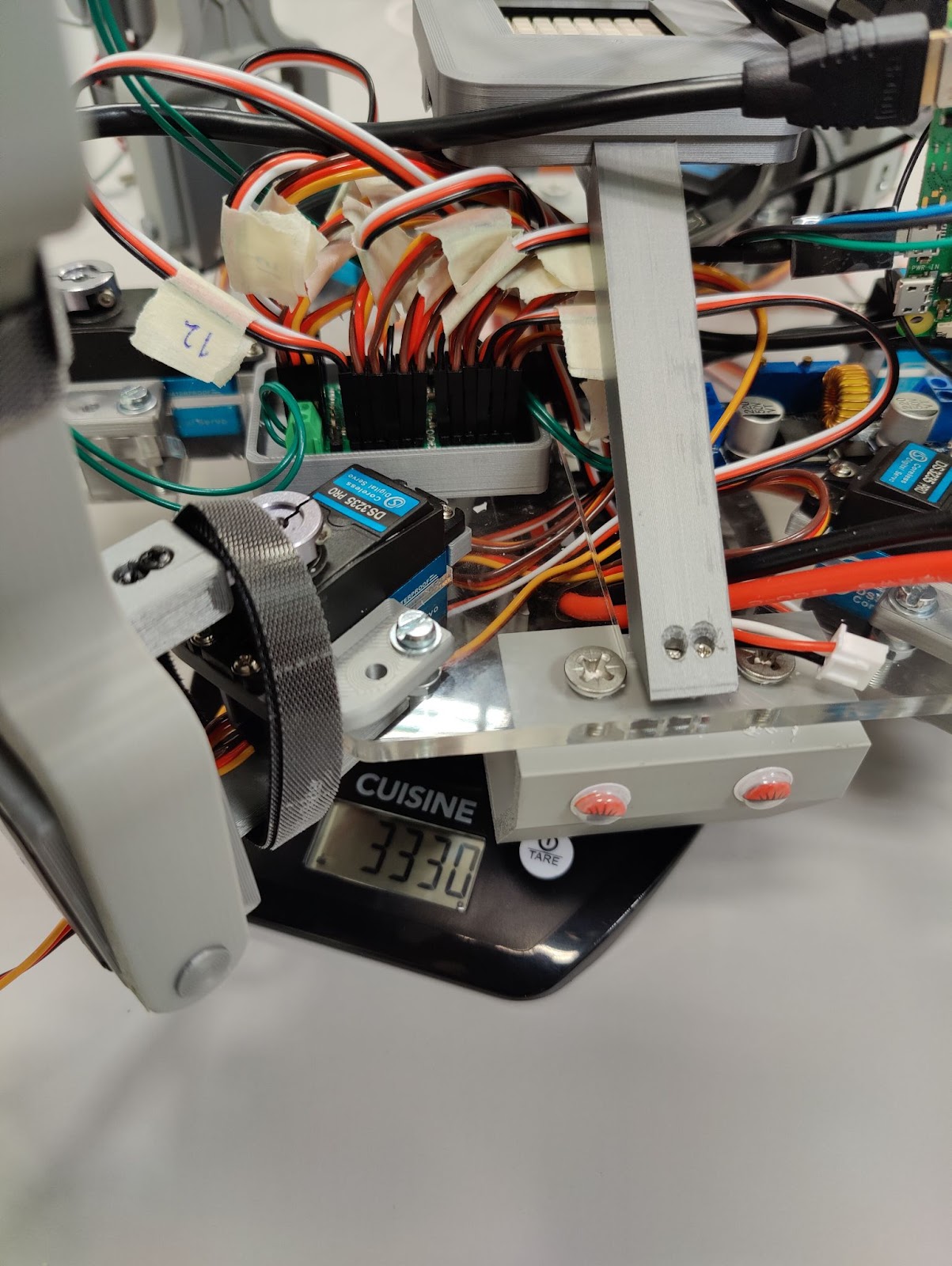
I tillegg har jeg veid “beistet” (edderkoppen), ettersom det er enklere å utføre FEM-analyse på mindre komponenter enn å bruke hele modellen. Den veier imponerende 3330 g!
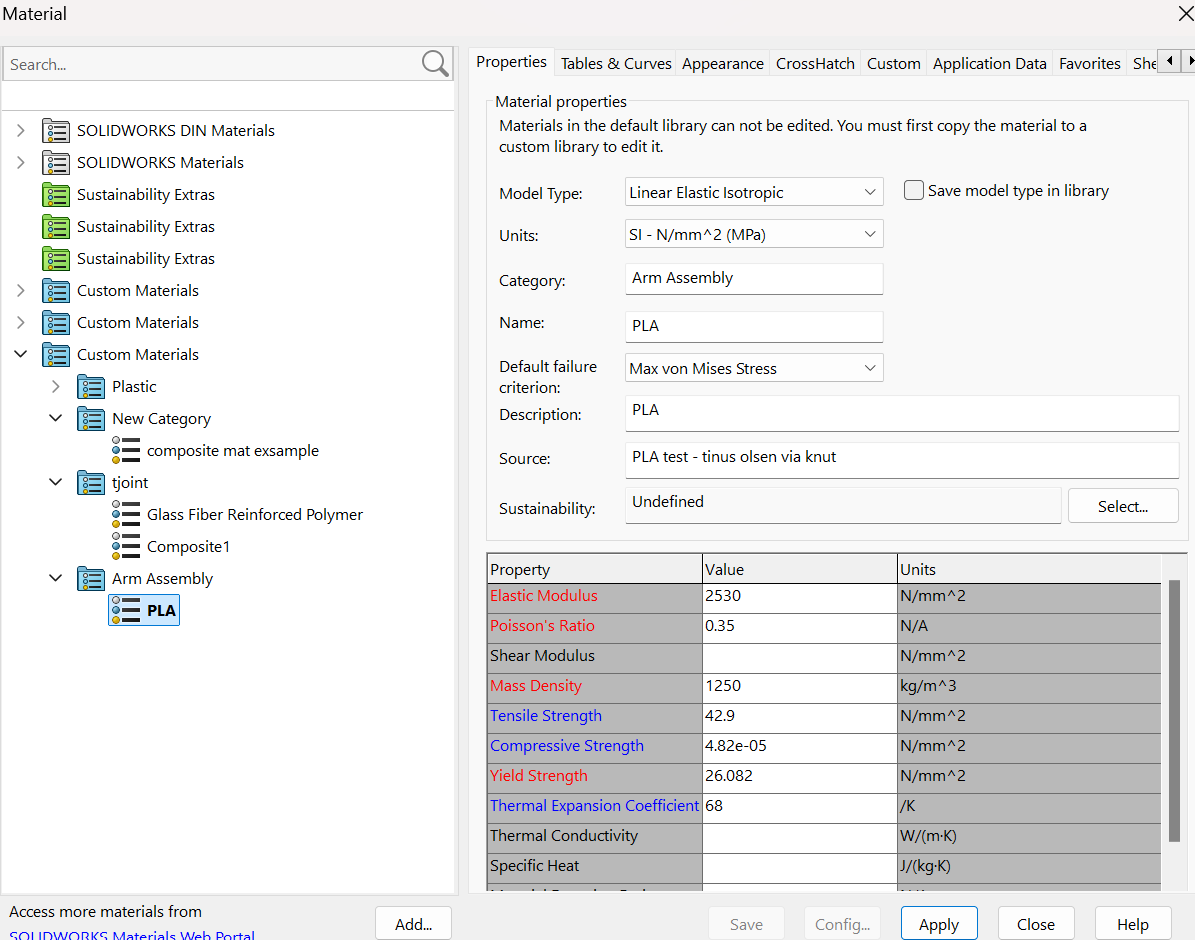
Jeg har også fått lagt inn materialverdier for PLA i Solidworks, slik at vi kan bruke disse i analysene og eventuelt for å optimalisere delens topologi videre i prosessen.
Jeg gjorde også et første forsøk på FEM-analyse av ett av beina, inkludert påførte krefter. Dessverre feilet analysen denne gangen, men det vil bli flere tester gjennom kommende uke, hvor jeg fokuserer på mindre komponenter og sammensetninger.
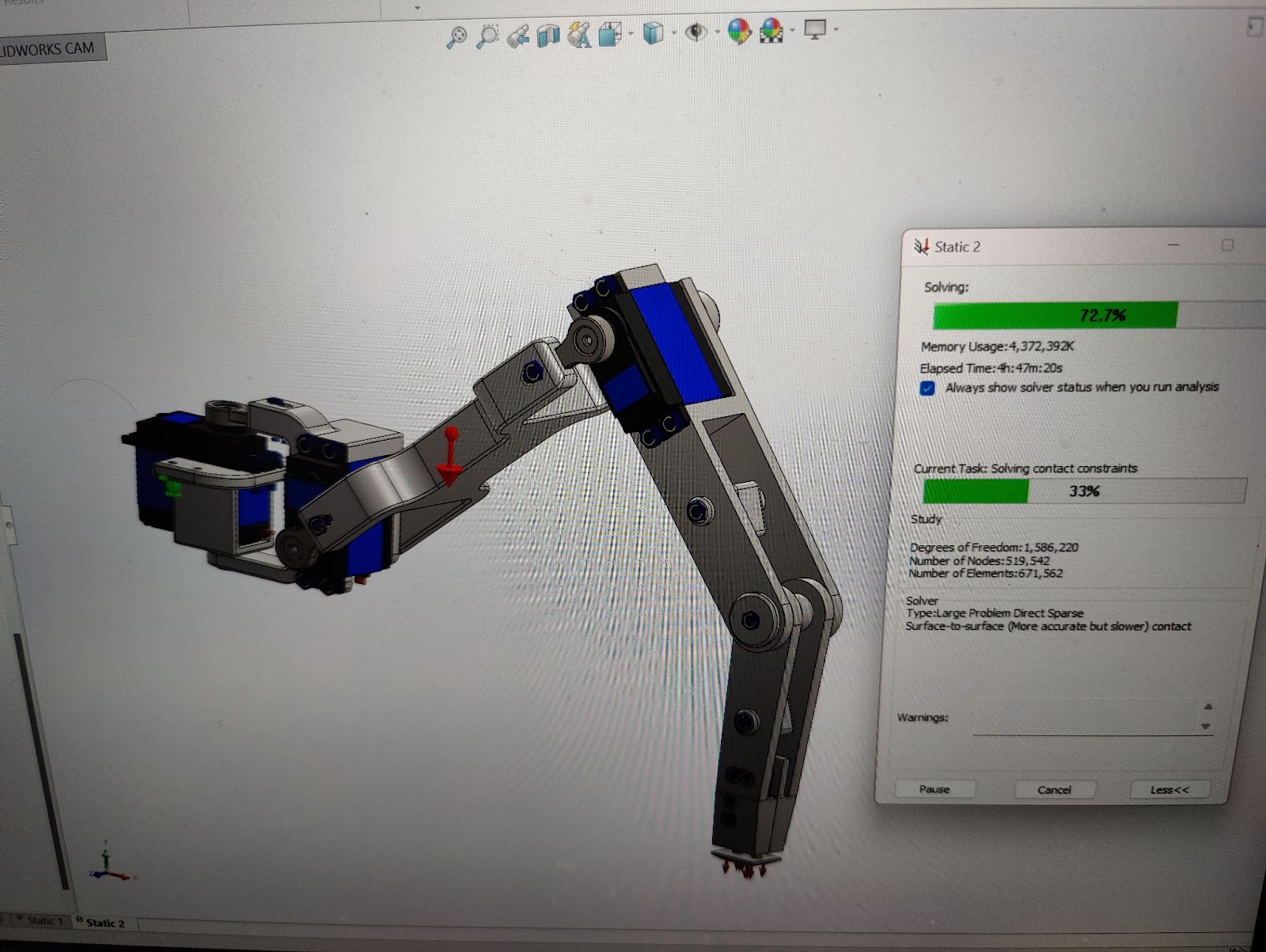
Det er svært utfordrende å justere verdier og kontaktflater når feil oppstår etter 17 timers kjøring, spesielt siden problemene først kan lokaliseres etter at prosessen har feilet.
Med så mange komponenter og omfattende arbeid er det tidkrevende, men vi kommer dit.
Vinay:
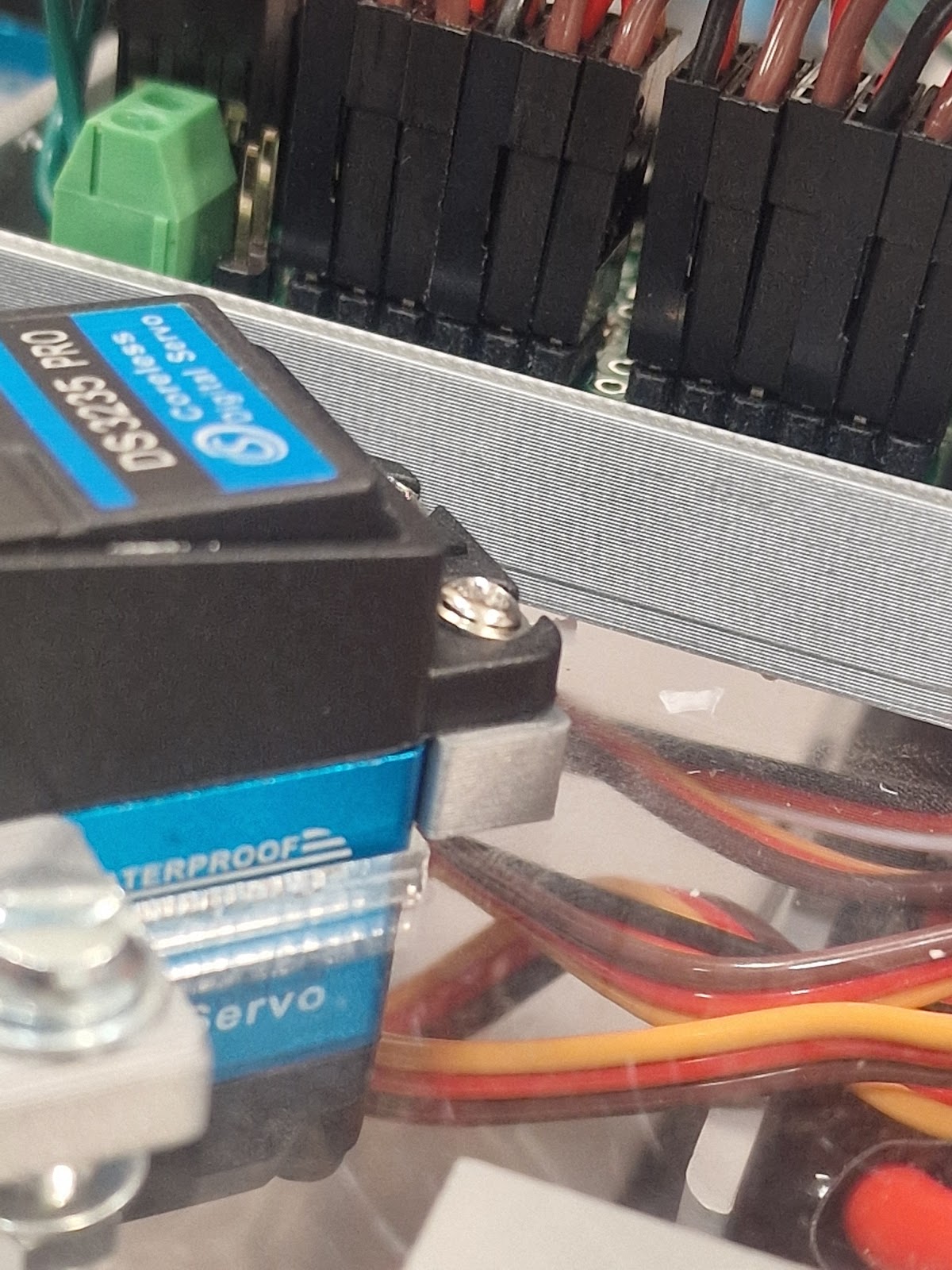
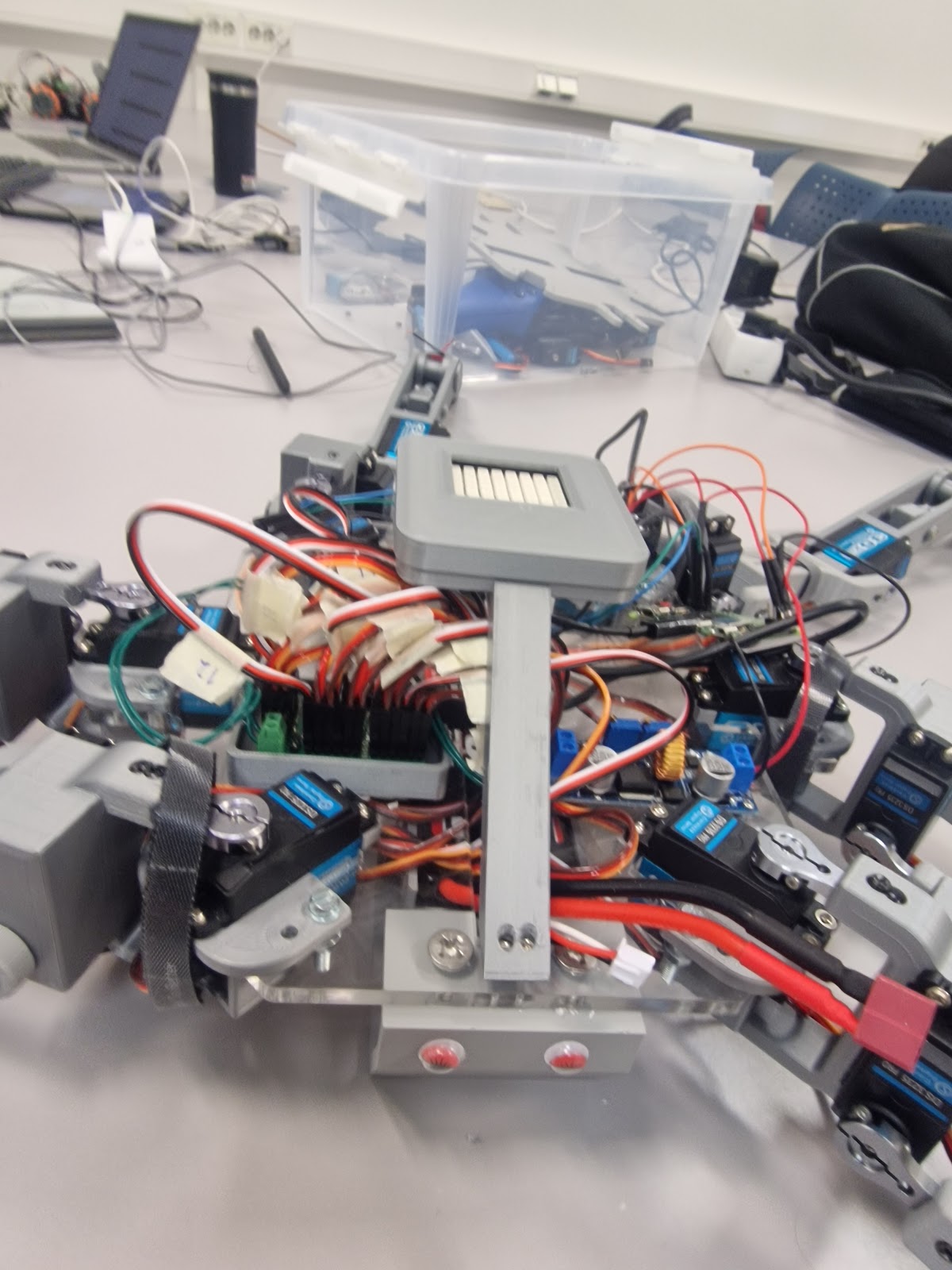
Denne uken har jeg montert spacere mellom nye akrylplaten og alle servoene montert på denne. I tillegg har jeg montert holderen til RaspberryPi Sense Hat’en.
Bilde av spacer mellom akrylplaten og servoen:
Bilde av Sense Hat holderen:
I tillegg til å montere noen komponenter, har jeg startet på FEM analysering av modellen vår. Fokuset mitt er komponentholderen/bunnplaten med batteriholder og batteriet.
Kristian:
Bunnplaten vi har brukt til nå er for fleksibel, og vi trenger en ny en. Heldigvis har Bjørn Ole laserkuttet en ny en av 6mm tykk akrylplate, som jeg har brukt litt tid på å montere. Dette viste seg til å være litt av en prosess: Alle kablene fra beinene måtte markeres og plugges ut, beinene og de elektriske komponentene måtte tas av bunnplaten, og alt måtte monteres igjen på den nye platen. For å gjøre ting verre var det mange hull som ikke var helt på plass og måtte borres større. Dette tok noen timer og jeg har ikke lyst til å gjøre det igjen.
Jeg har også modellert en enkel holder til en USB-hub.
Martin:
Jeg har begynt på versjon 1.1. av koden vår.( https://github.com/martintara/creepy/tree/creepy1.1/src )Konstruktøren på Leg klassen begynte å bli enormt lang, så jeg tenkte det måtte finnes en mer elegant måte å gjøre dette på. Leg klassen tar nå imot en liste med servomotorer. Vi starter nå med å generere alle servobjektene først. Denne listen med servoer ser ganske simpel ut men det ligger timesvis med testing bak for å finne ut riktige posisjoner. Det er langt i fra en perfekt løsning, men det viktigste nå er at det fungerer. Jeg har startet prosessen med å mappe disse posisjonene mot vinkler men det er ikke implementert enda. Ideen er å kunne instruere servoene til å gå til en spesifikk vinkel i stedet for å måtte sende et tall mellom min_pos og max_pos.
Samtidig med å videreutvikle koden så prøver jeg instruere de andre datastudentene slik at de skal kunne bruke koden selv. Didrik begynner bli rimelig varm i trøya og har begynt å se på timingen på et forenklet ganglag. Jeg har troen på at han får til det alene nå. Dette gjør det mulig for meg å fokusere på et mer avansert ganglag. Det er godt å kjenne på at jeg ikke skal stå for all kodingen selv. Vi er tross alt 4 datastudenter i gruppa og jeg kjenner på et ansvar om å inkludere alle i utviklingen.
Ida:
Denne uken har jeg brukt tid på å sette meg inn i koden de andre har skrevet for oppsettet av bein og servoer, for å få en bedre forståelse av hvordan vi kan skrive kode videre på bevegelsesmønstre. Vi har også diskutert bevegelsesbegrensning for hvert bein for å kunne unngå kollisjon.
Jeg brukte også litt tid på å undersøke hvordan vi kunne sette opp et ad-hoc nettverk på Raspberry Pi for å oppnå stabil kontakt. Men Bjørn Ole kom på at vi heller kunne bruke det private nettverket IRI-LAB.

Didrik:
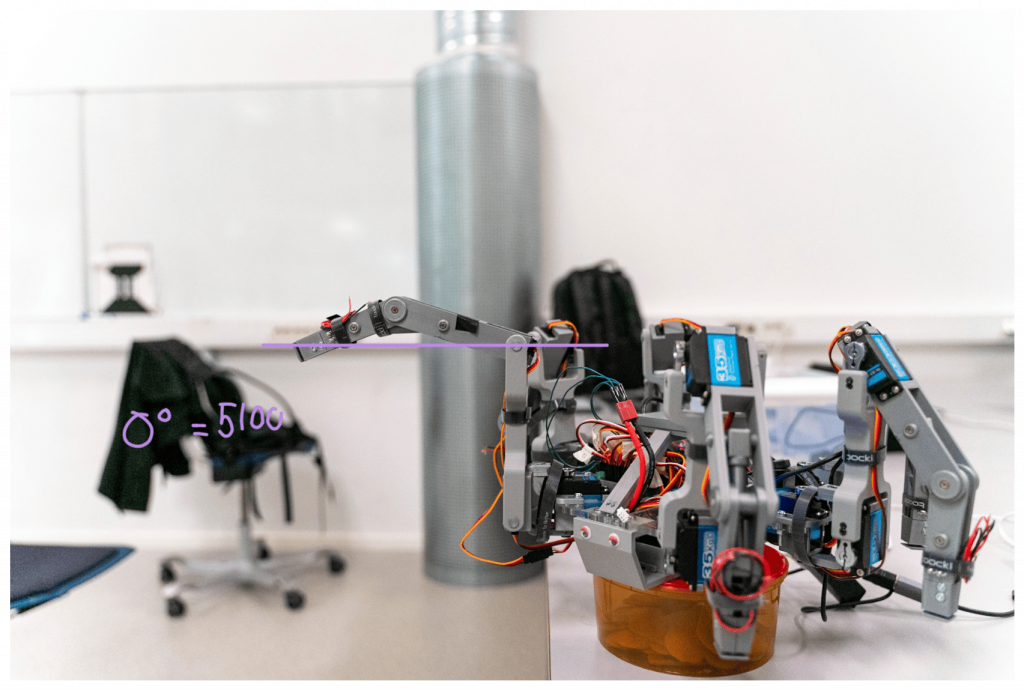
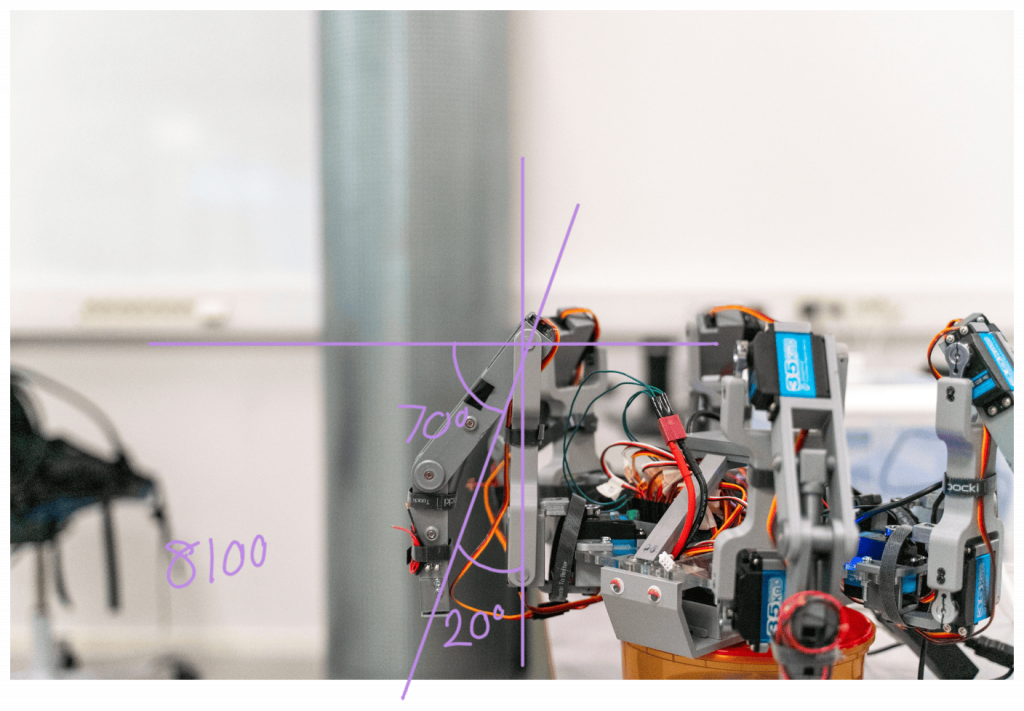
Denne uken så har vi; med verdiene fra servomodulens program, mappet verdier som vi kan sende med python kode. Vi mappet først min og maks verdi, men når vi tenkte mer på det så for at vi skal kunne ha mer kontroll på bevegelsene når flere bein går samtidig så var det mer intuitivt å gå ut ifra en “midtposisjon” hvor vi så definerer grader ut fra den.

Senere så brukte vi denne nye metoden til å få hvert bein til å reise seg slik at den står! Nå er neste steg (haha) å få den til å gå.
Ellers er det stadig vekk litt lodding på gang. Det gjorde underverker at Martin tok med eget loddeutstyr.
Bjørn Ole:
Siden vi har hatt utfordringer med nettverk og ikke lykkes med å sette opp en ekstra RaspberryPi som lokalt nettverk, kom jeg opp med løsningen å bruke nettverket fra “Nettverk og Sikkerhet”-faget: IRI-LAB. Dette løste enkelt de utfordringene vi hadde med nettverk.
Denne uken har blitt brukt til å lære av hverandre. Noe erfaringsutveksling mellom datastudentene, slik at alle har kunnskap nok til å skrive testkode og kjøre denne. For at alle skal kunne teste koden sin, har vi brukt SSH til RaspberryPi’en for å koble oss til direkte.
Jeg har også laserkuttet en ny base til prosjektet slik at den blir stivere. Da unngår vi at den “vrir/bøyer” seg under press: https://drive.google.com/file/d/1fJPz9cdpea2AYOzdssTJwP-1UVi2rwvf/view?usp=drive_link