Spider Manufacturers (Maskin):
Spider Manufactures har revidert designet, funnet forbedringspotensialer, utarbeidet nye 3D modeller, produsert (3D printet) og montert.

Creepy Coders (Data):
Siden første utkast av robot edderkoppen var ferdig så satte vi inn begrensninger og startposisjon til servoene slik at de ikke kunne ødelegge seg selv.
For å gjøre dette så brukte vi programmet Pololu Maestro Control Center, som definerer verdier til servoene som startposisjon, min/maks begrensning, fart og akselerasjon.
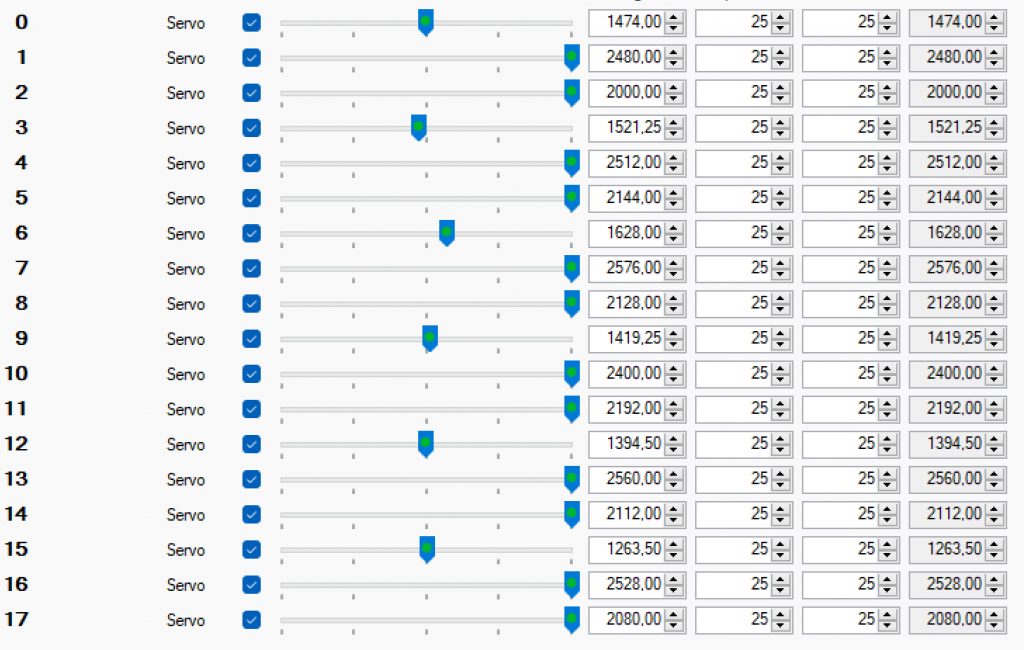
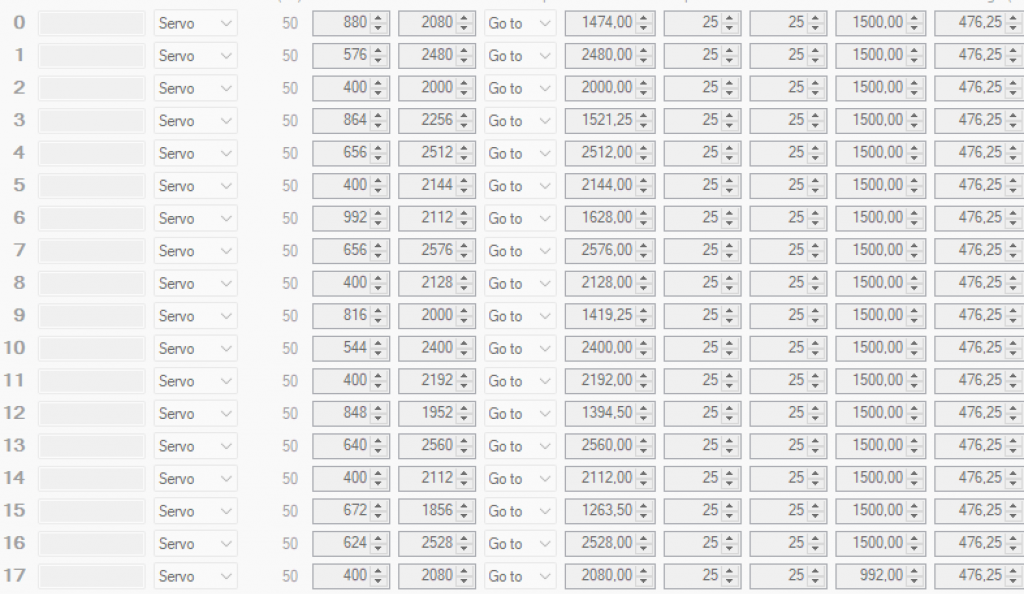
Go to verdien var løsningen! Disse verdiene blir flashet til servomodulen så vi får riktig oppstartsposisjoner da systemet først får strøm.
Senere i uken så ble det endringer i designet som gjorde at de måtte stilles inn på nytt.
Vi klarte endelig også å få kontakt mellom Raspberry Pi’en og xbox kontrolleren slik at vi kan i framtiden styre roboten manuelt.
Individuelle innlegg
Ole Martin:
Etter monteringen av roboten vår forrige uke oppdaget vi at flere av delene ikke holdt mål på grunn av underdimensjonering eller feilaktig 3D-printing. Derfor startet vi denne uken med en grundig designgjennomgang, hvor vi identifiserte delene som trengte forbedring. Samtidig tok vi en rask gjennomgang av 3D-printerens innstillinger for å sikre bedre resultat i fremtiden.

Mye av tiden har gått til å printe nye og oppdaterte deler, som erstattet de svakere komponentene. I tillegg har jeg satt i gang produksjonen av en karbon- og glassfiberplate som skal holde de fleste delene på plass, ettersom den eksisterende delen er for fleksibel.
Parallelt med dette har jeg designet en holder til Raspberry Pi Sense HAT, som skal monteres på robotens plate. Denne løsningen løfter kretskortet slik at LED-matrisen kan benyttes til visuelle indikasjoner, samtidig som den åpner for flere funksjoner via Raspberry Pi Sense HAT.


Til slutt vil jeg rette en takk til Knut Sandbæk for å ha delt sine testresultater for 3D-printet PLA. Dette gir oss et godt grunnlag for å integrere testdataene og komme i gang med FEM-analyse av roboten.
Vinay:
Denne uken har blitt brukt til å jobbe med strukturen til robot edderkoppen. Fra forrige ukes montering og arbeid, fant vi en god del forbedringspotensialer. Under testingen som data studentene gjorde, var blant annet noen komponenter på beina for svake. I tillegg fikk selve kroppen for mye vibrasjoner.
Blant annet har jeg 3D printet deler som har blitt tegnet på nytt. Denne gangen printet jeg med høyere prosent infill, som betyr at komponentene blir printet med mer fyll innvendig, som er med på å forsterke.

I tillegg til å printe nye forsterkende komponenter, ble tiden brukt til å montere disse på roboten.
For selve kroppen har jeg utarbeidet en 2D tegning, som i utgangspunktet skal brukes til å lage kroppen i karbonfiber, men det er kanskje mulighet for å CNC frese karbonfiberplaten som er under produksjon.
Kristian:
Jeg har brukt den siste uken på å forbedre de forrige modellene som var for svake og vanskelige å montere. For eksempel har jeg oppdatert denne delen:

Generelt sett har jeg gjort de tynne stedene litt tykkere. Øverst på delen har jeg lagt til en ny vegg som holder servoarmen på plass. Uten den var delen enklere å 3D-printe og montere, men den viste seg til å ikke gi nok støtte. I tillegg er det lagd hull for settskrue på bunnen, slik at tappen for å holde ting på plass kan settes inn fra andre siden. Dette gjør det mulig å montere delen med den nye veggen.
Martin:
Mandag
Første dag med programmering på “fullverdig” prototype. Første problem som oppsto var at servoene sto i feil posisjon da prototypen ble montert. Vi måtte demontere den, resette servoene og montere den på nytt. Videre viste det seg at festene på armene var for svake og de knakk så fort jeg satte bevegelse på servoene. Jeg satt også flaut mange timer med å opprette kontakt mellom en xbox-kontroller og raspberry pi. Det samme gjaldt med å få kontakt mellom raspberry pi og raspberri pi sensehat. Har håp om å få brukt diverse sensorikk som ligger i dette kortet. Hvis ikke det skjer så skal vi i det minste få liv i led matrisen.

Torsdag og Fredag
Jobbet videre med den objektorienterte løsningen i python. Siste versjon vises her https://github.com/martintara/creepy/tree/main/src
Ida:
Denne uken har jeg fortsatt arbeidet med ROS2 og fått en litt dypere forståelse. Jeg opprettet mitt eget workspace og utviklet to noder, en publisher og en subscriber, som opererer via ROS topics. Jeg har også utviklet to noder som kommuniserer via ROS services, den ene er request og den andre er respond.
Underveis har vi funnet ut at det kan bli for tidskrevende å bruke maskinlæring i prosjektet, og at det er lurt å fokusere på de grunnleggende funksjonene først.

Didrik:
Denne uken så brukte jeg mandagen på å gi servomodulen begrensninger til hver enkelt servo ved bruk av PoLoLu Maestro Control Center, men siden vi måtte redesigne store deler av armene så måtte verdiene finjusteres igjen på torsdag.
På fredag så lagde jeg noen forslag til forskjellige design som kunne dukke opp på led displayet når roboten var i ulike “states”.
Ellers ble det lagt inn diverse arbeid i demontering og montering.
Bjørn Ole:
Jeg har laget et enkelt Blokk-Diagram for systemet. Dette er en oversikt som viser hvordan komponentene er koblet til hverandre og hvordan de jobber sammen. I tillegg til diagrammet, har jeg laget en beskrivelse, som forklarer hva hver enkelt enhet i systemet er, hvordan den er koblet til og hvordan den jobber med systemet.
