Maskin
Anders:
Det har blitt gjort en del forandringer med hensyn til vogna og reim rent mekanisk.
Reima vi har tatt i bruk er “litt” overdimensjonert så det har blitt lært noen lekser.
- Gjøre reim “uavhenging” av vogna som slider frem og tilbake. Årsaken til dette er at tidligere løsning, hvor hver ende av reima var skjøtet inn på vogna skapte en del uønskede krefter som dro vogn i flere retninger med mindre alt var linet opp helt perfekt.
- Tjukkere gods i det meste av 3D-printede deler, relativt “mye” krefter pga reimstramming som førte til at noe ga etter.
- Flere muligheter for å justere både reim og innfesting på vogn.
Blant annet at reim måtte strammes opp helt uavhengig av vognen som vandrer frem og tilbake,
Slik fikk jeg fjernet en del krefter som dro vogna i uønskede retninger. Samt små justeringer på mål og hull for mer fleksibilitet for stramming og justering.
Litt produksjon av deler:

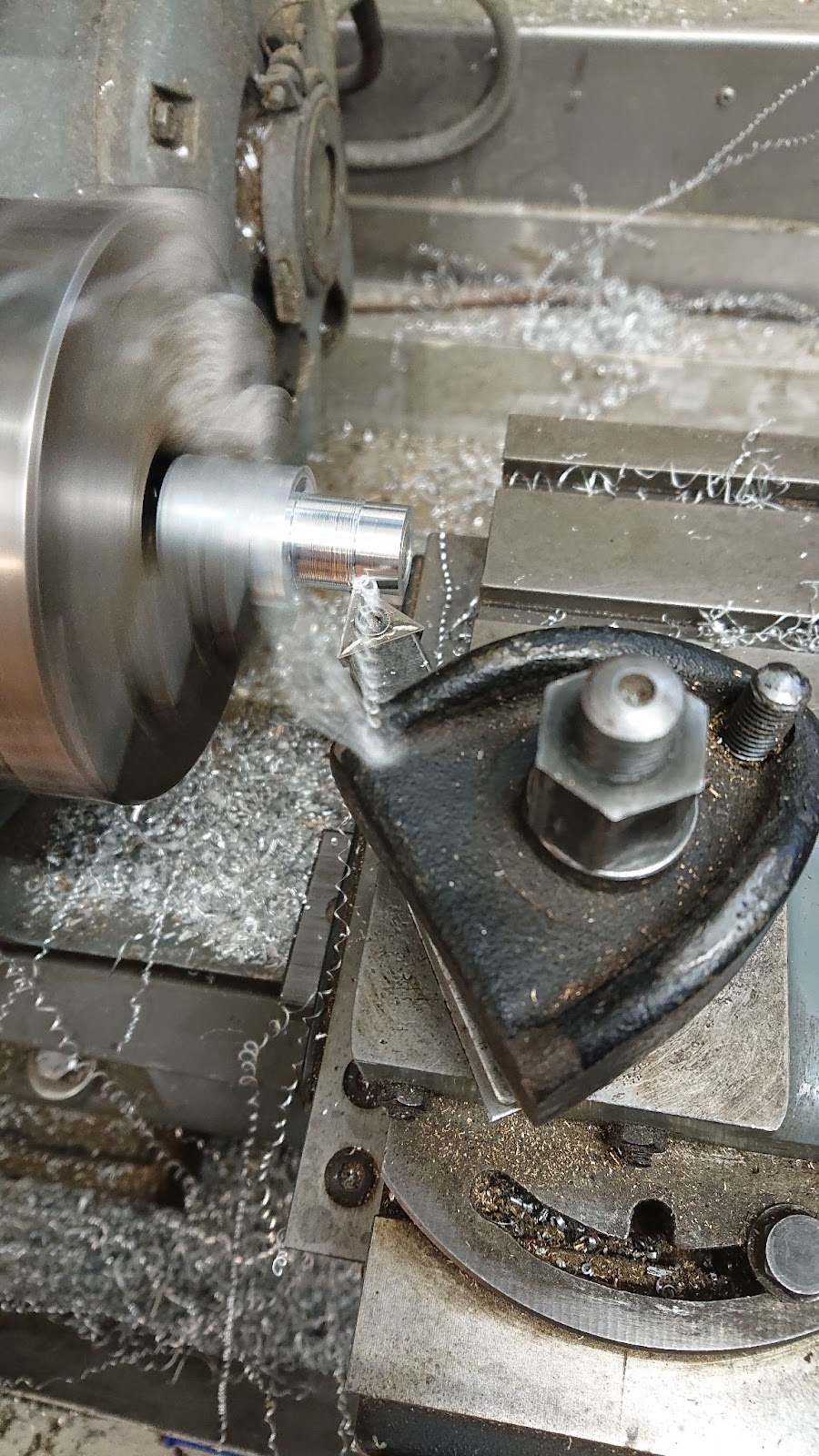
Test med nåværende design, her er reim skjøtet i bunn og strammet uavhenging. Vogn henger med på reim i topp:
Andrea:
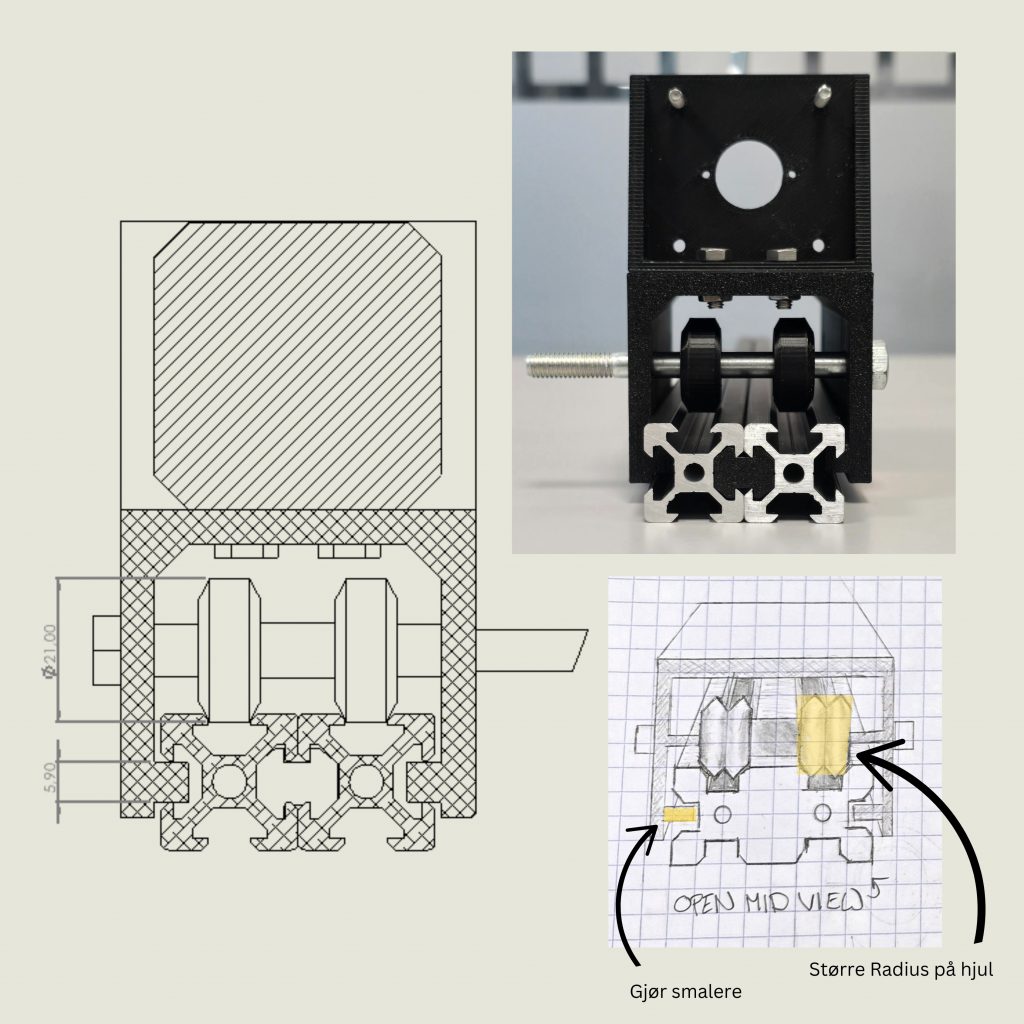
Denne uken har gått til mye produksjon av deler som kan sees i Anders sitt innslag. Etter prototypen som ble laget forrige uke, var det flere endringer som måtte til. Hjulene var ikke store nok, som skapte slark og gjorde at vogna slepet på siden av skinnene, da de delene som slepet er designet for at vogna ikke skal hoppe av skinnene under drift. Disse delene skal også gjøres litt smalere slik at størrelsen på hjulet har mer større toleranse. På Bilde 1 er det gjort opp tegninger for revidering.
For at Data skal få begynt å teste tracking av ballen på bordet, måtte fargen på ballen byttes til en som er lettere detekterbar. Dette er gjort ved først å rense overflaten av ballen med aceton (da den var litt oljete og møkkete). Den ble pusset ned med 180 korn sand pad, renset igjen over med aceton og dekket i 3 lag med oransje UV gel. Siste laget er en top coat. Hvert lag herdes under en UV lampe. Denne metoden vil sikre at fargen er slitesterk og ikke vil flake av under bruk av spillet. Hvis systemet vårt ikke ser ballen lengre, vil den ikke kunne sende signal som styrer motorene.



Mye av tiden denne uken har gått til videreutvikling til prosjektet.
Vi trenger støtter til bord delen som skal holde motorene. En del av vurderingen vår er om det trengs sterkere bordbein og mer støtte til de generelt. Da de største av de to motorene vi har er ganske tunge ser vi også på eventuell støtte mellom beina. Det vil også gi en gylden mulighet til å bruke disse støttene for montering av kamera under bordet.
Data
Erik: Fått motorene til å gå med bruk av python og C++ med Raspberry PI 5. Kan styres med enten steps eller revolutions. Har prøv å installere OpenCV så den kan brukes i både python og c++, men har fått litt problemer. OpenCV kjører fint i python, men får litt porblemer når det kommer til å C++.
Elektro
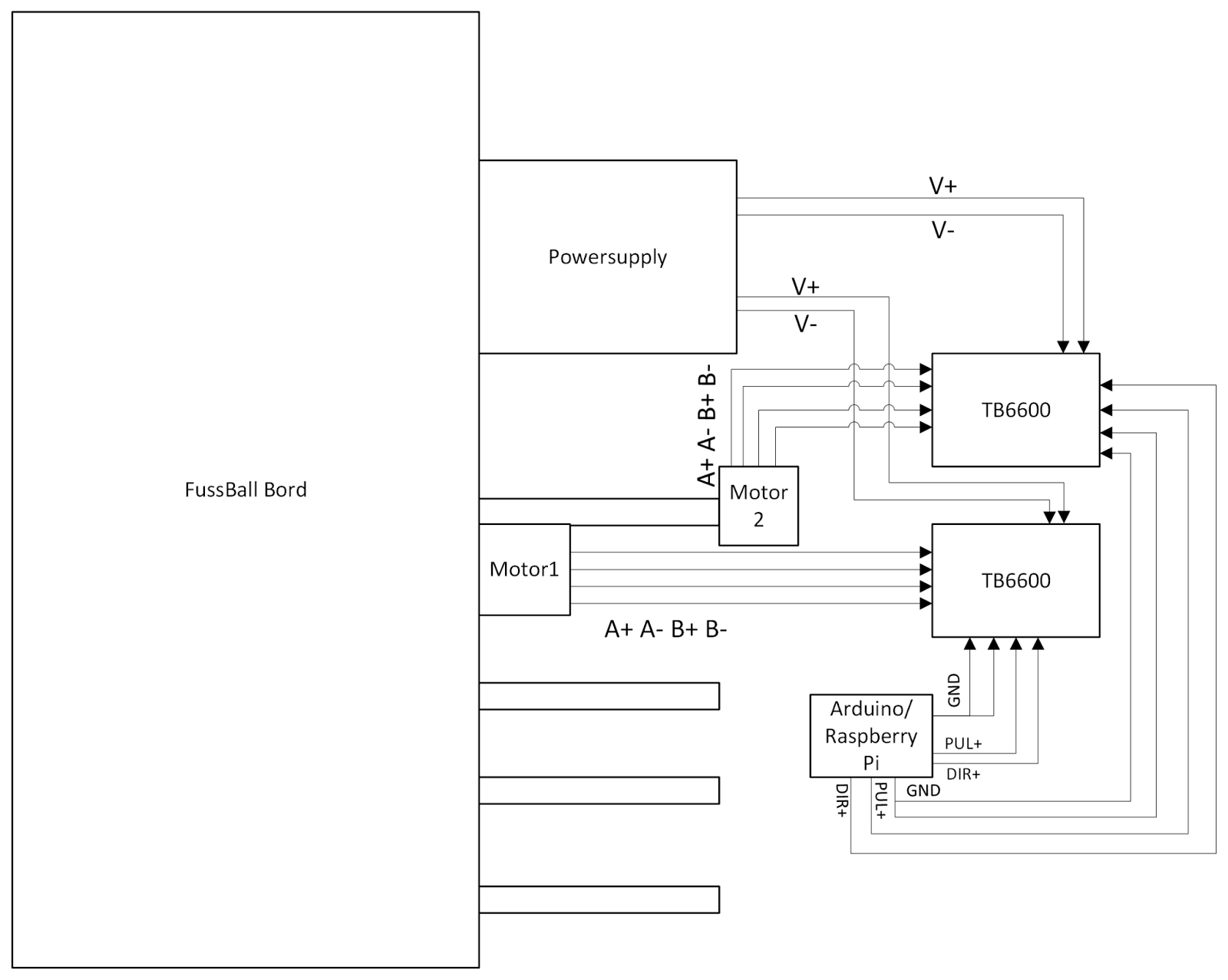
Kristian: Denne uken har jeg laget lite koblingsskjema i Visio av hvordan jeg ser for meg at systemet skal se ut. Denne uken har også gått til å teste motorene sammen med Raspberry pi i samarbeid med Erik. Har også begynt å se litt på et system for telling av stillingen. Dette har jeg foreløpig tenkt å løse med en IR sensor.