07.10.2024 – 13.10.2024
“Opportunities multiply as they are seized”
-Sun Tzu, The Art of War
Group Summary
Dearly beloved,
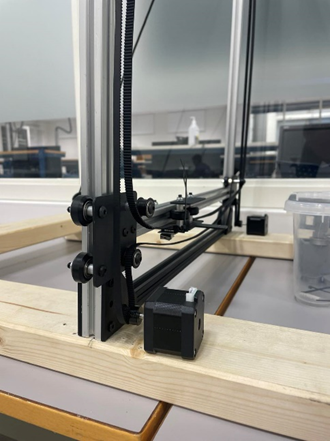
for the second week in a row, things have been a little more relaxed due to more exams being prioritized. We did, however, do some modifications with our prototype on Monday, we finally got proper belts that connect the motors to the moving target. This was a huge improvement compared to the regular ropes we had mounted before, which have almost no friction, so wheels would easily slip. We also changed our dolly wheels from cheap plastic parts to proper metal components, which move around much smoother. Lastly, we noticed that the structure was quite unstable due to its height-to-thickness ratio, luckily our genius mechanical engineer Hans easily stabilized it by using rope to create simple barduns. Pictures of this can be seen in Hans’ individual summary.
Individual Summaries
Eirik (Data):
I have been fooling around with the HOG descriptor algorithm in Python once again, this time trying to do some coding. I decided to that the code should expand its target to include the entire human body, instead of just the head.
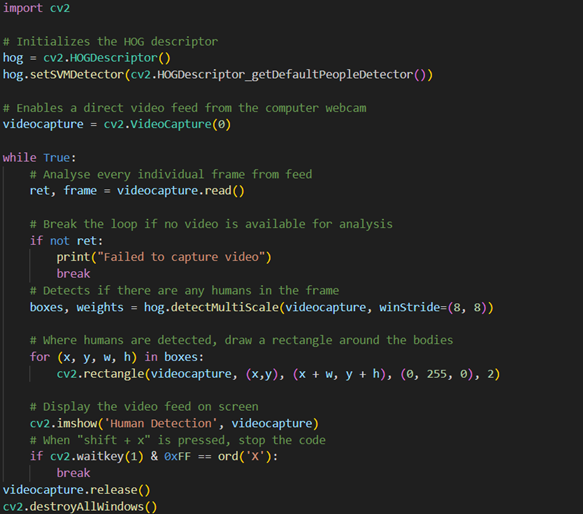
This is the code I have to recognize humans with, but I cannot for the life of me get it to compile at the moment. Every time I run the code, the camera turns on, but quickly turns itself off again. Then this message appears:

At this time (17:55 on Sunday the 13th) I have not been able to find what causes this, but if I figure it out before this post is published, which is usually on Mondays right before or after the lecture, I will come in here with an update.
So after a few hours of passive-aggressive guitar playing, the clock is now 21:30, I went back to see if I could find the issue. And love and behold, I did resolve it.


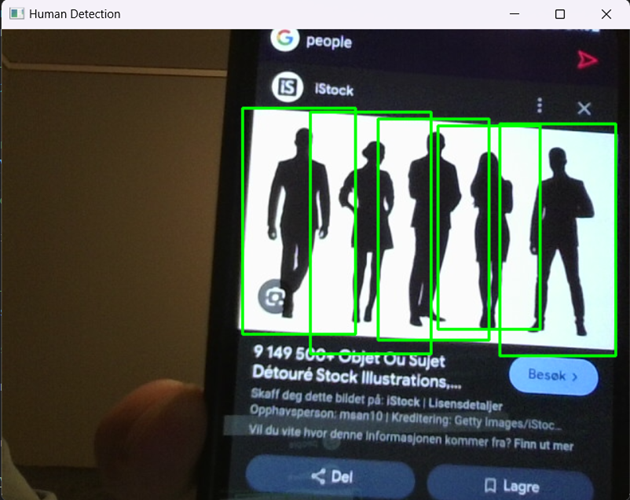
The problem lied in the fact that I in all loops used the “videocapture”-variable instead of using frame. This meant that the code would try to analyze the video stream as a whole, instead of analyzing each frame individually. This would overwhelm the program so that it would force-close itself. I also had appearently written “if cv2.waitkey” instead of “if cv2.waitKey”, and quickly found out that it is case-sensitive. Now the code runs perfectly and can easily identify humans, whether it is in a picture on a screen or an actual person in the room.
Then I of course ended the week by nagging/forcing the rest of the group to write their individual summaries before I publish this post.
Robin (Data):
This week has been my vacation week, so I haven’t contributed to the project this week.
Fredrik (Data):
I wasn’t sure what to work on this week, so I ended up working on other classes.
Vetle (Electrical):
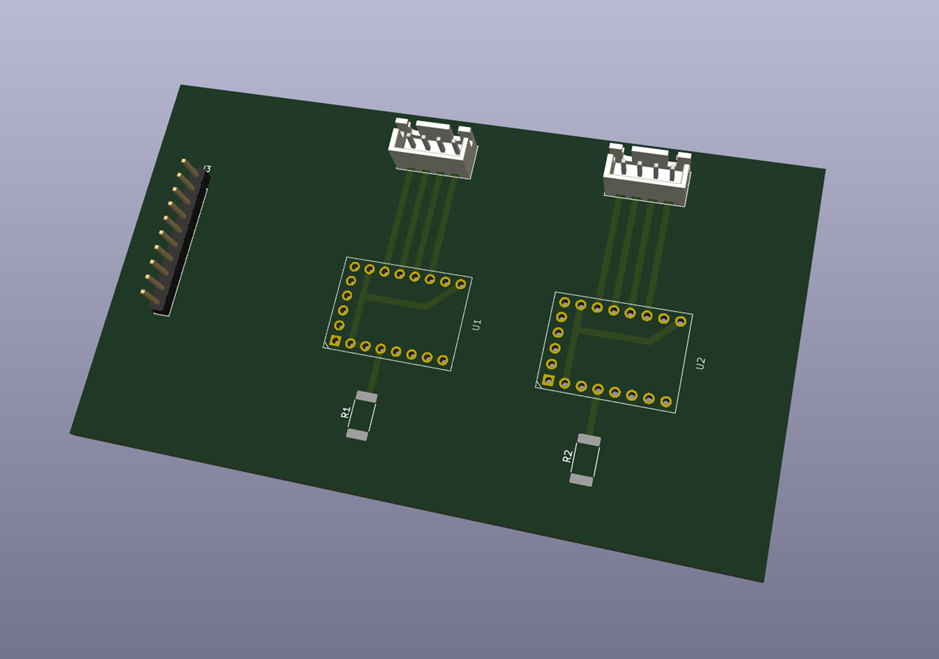
I have started the initial circuit and PCB design. I have yet to choose voltage regulators and some connectors. I don’t know how many connections we need from the Raspberry Pi yet, so I have just gone with a 01×10 2.54mm header for the input signals while I am figuring out how many we need in the end.
Kadir (Mechanical):
This week I had 2 exams and have therefore assisted Hans in his tasks.
We did some mounting on the prototype and looked for parts to use.
Continued to develop the ‘’shoot back feature’’
New motors were drawn to modify our model.

Hans (Mechanical):
The last week I have been working on modifying the prototype to get it ready for the electro engineer. We got our hands on some more parts from Richard and Vetle, that made it possible to level and square off our model, this was important to get the dollies to be able to move freely.
The new dolly wheels have made the resistance nice for our motors and belt drive.
Started making drawings for the new parts that have been given.

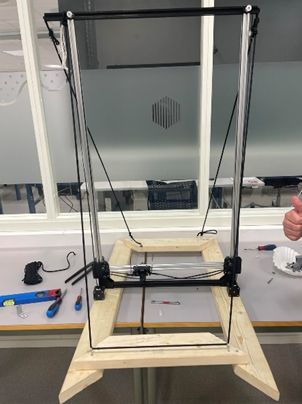
The model was tall and sleek, so we added some barduns to keep it tight and straight.
Ps: The bottom frame is temporary and will be changed with a fitting and painted one.