The fifth week was full of anticipation, since we were still waiting for a 3D model to pop-up.
Individual work:
Adam:
This week I have finished with model of the jaws and started their assembly and was looking for information about a 3D printing.
Adrian:
Preparing for the finished 3D model, I looked into controlling a self made robotic arm with MoveIt 2. Making the arm compatible, I need to create an URDF file for the arm which specifies limbs, sensors, collision meshes etc. There’s two ways of doing this. Directly make an URDF file, or use Xacro for reusability and lessening the redundancy of the URDF file. However, for the specifications in the file to match the real deal, I need the 3D model. For now, I can only make assumptions knowing how many limbs, sensors and motors there will be.
Jacob:
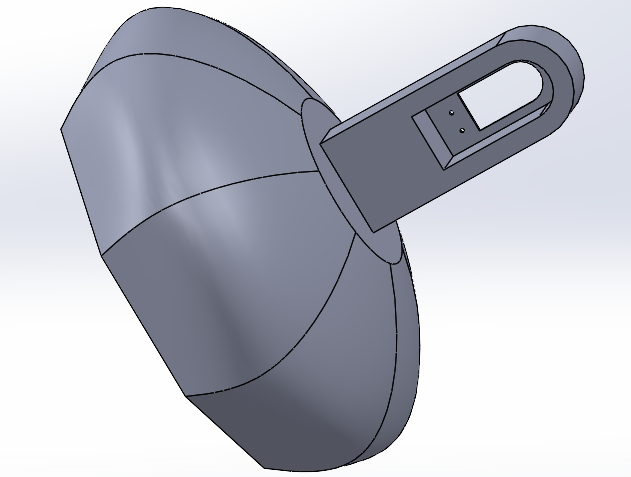
I was waiting for our arm designers to come up with a design, and in the meantime started to realise a prototype of the claw.
Farah:
I completed a comprehensive course on advanced ROS2 features, including using Docker’s container environment. I dove into complex topics like ROS2 services and action servers, which are essential for controlling the robotic arm in real time. Plus, I compared Gazebo and Unity for simulations, checking out how each integrates with ROS2 to figure out the best platform for our project
Pamela:
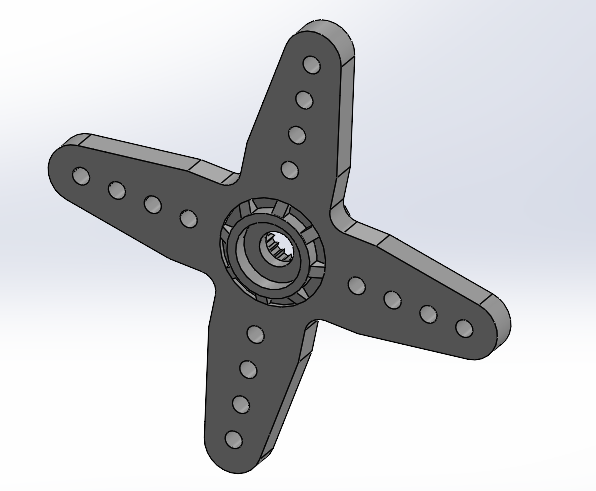
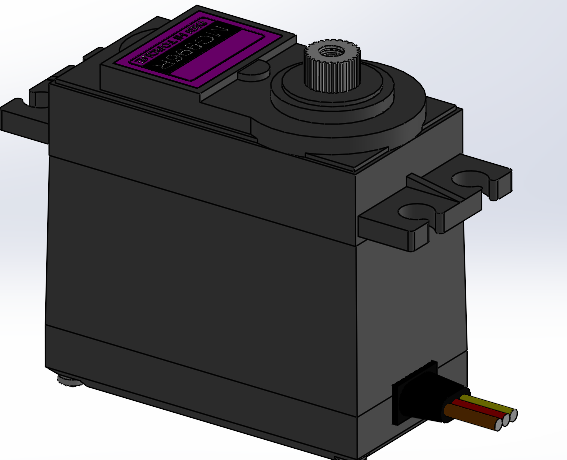
This week I found the pieces to join the servomotors with the robotic arms
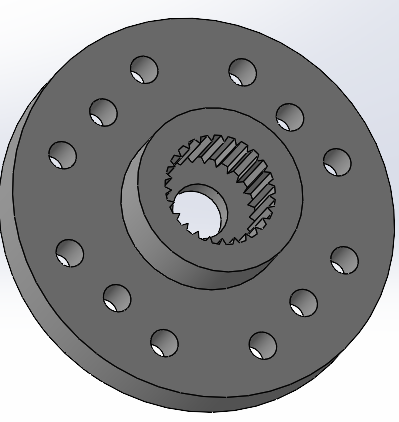
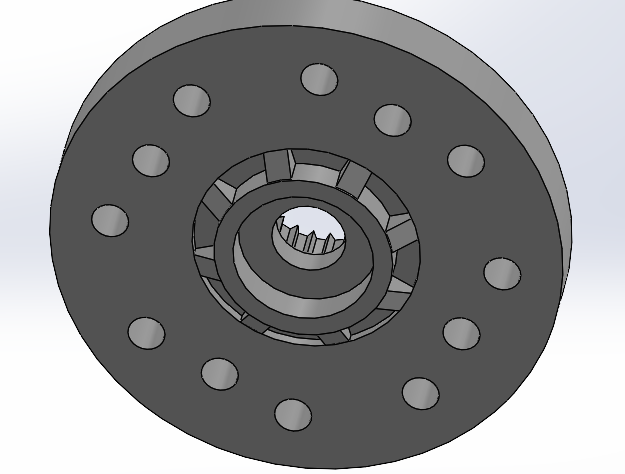
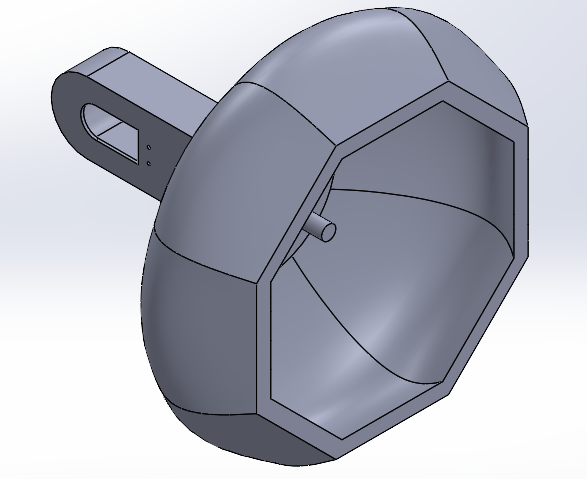
Then I did the mechanism that joins the pincher mechanism with the robotic arm:
Sergi:
During this week, first I did some sketch of the robotic arms, here are the photos of my SolidWorks version:
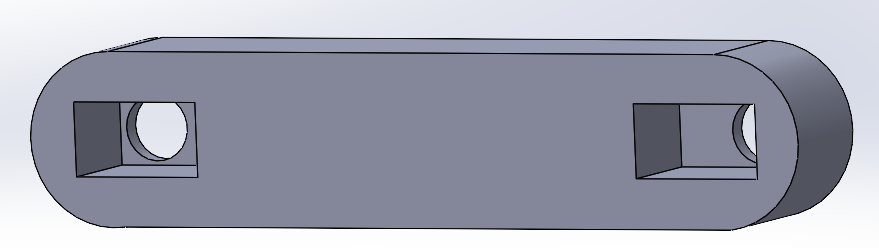
But then I did the final version of the robotic arm based on the pieces to gather the servomotor with:
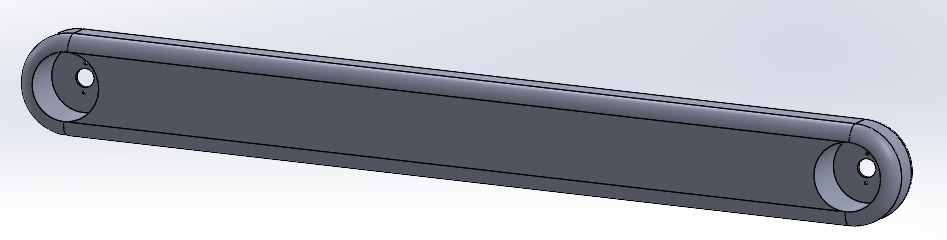
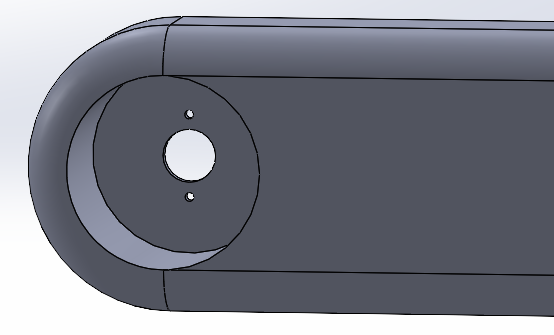
Also I made the 2n arm, here you can see that I have put a space for the servomotor to be able to fit well and stick it with the 3rd robotic arm:
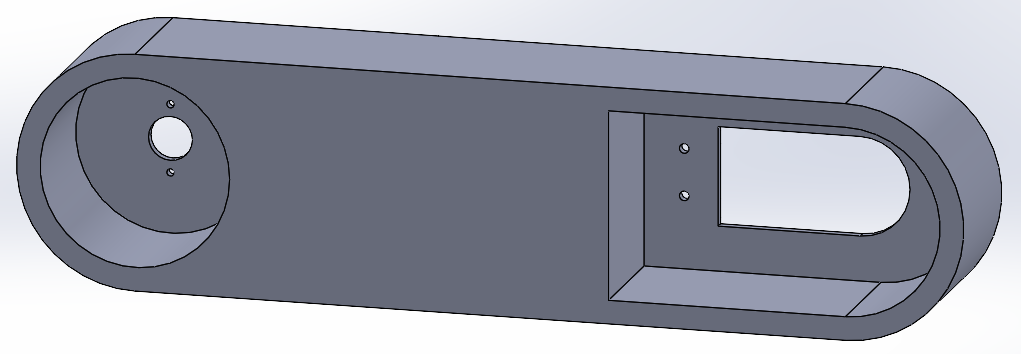
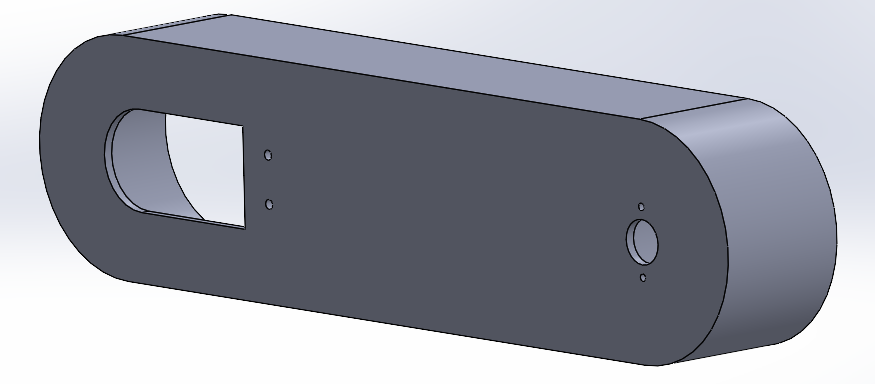
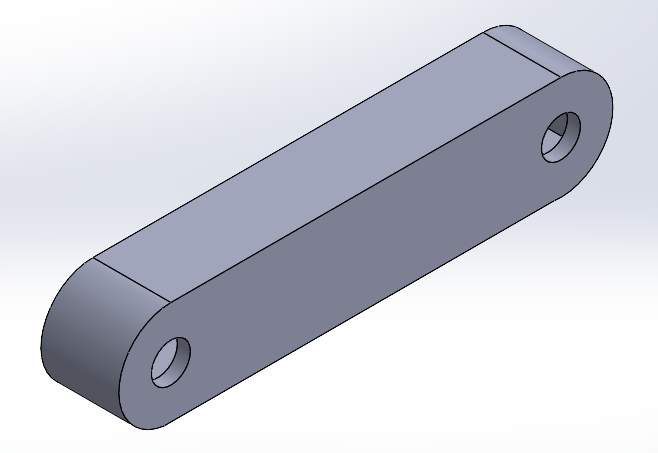
And finally I made the last arm (3rd arm) that connects with pamela’s mechanism: