30.09.2024 – 06.10.2024
“The only limit to our realization of tomorrow will be our doubts of today”
-Franklin D. Roosevelt
Group Summary
Dearly beloved,
the mid-term presentation went smoother than silk, and hopefully Fredriks exam that day went equally the same way. This week has been slightly more laidback than usual, mostly due to different team members having to re-take exams on different days of the week. Naturally an exam will always be given first priority, so we decided to turn down the pace a little so nobody would fall behind. We still have done some practical work though, so we have not all taken a vacation this week (except for our group leader). Hans and Kadir have started designing 3D models of the turret system that will be shooting back at the player using computer vision, while Robin is spending his vacation trying to transfer his simulations into working code.
Individual Summaries
Eirik (Data):
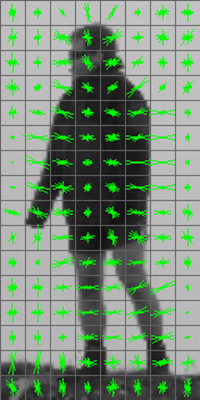
Though I have not re-taken any exams this week, I have been focusing more on my other subjects than smart systems this week. However, I have looked at the Histogram of Oriented Gradients (HOG) algorithm that is used to describe images based on gradients directions and magnitudes as can be seen in the illustration. This can be interpreted to recognize an entire human body rather than just the face, which is more practical given the distance between system and player.
Robin (Data):
This week I’ve had an exam and are currently on vacation, so my work is heavily affected by those.

So, what I am working on now is transferring the simulations into code that can be used on the real system.
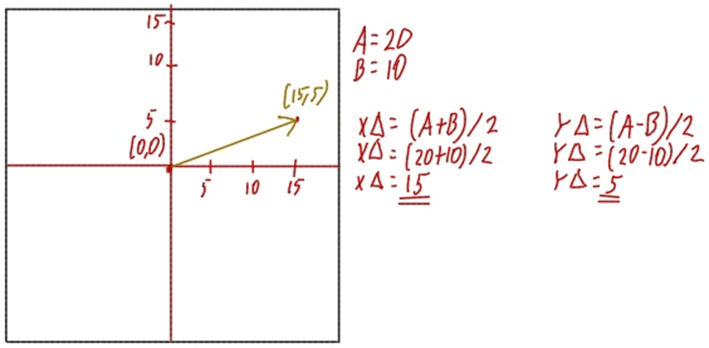
Earlier I have used two parameters that decides how fast and in what direction the target move, however in the real system, we will try to have an origo (0,0) and then count the steps to know the exact position the target will be at when moved. An example of this would be if it starts in position (0,0) and motor A moves 20 steps and motor B moves 10 steps.
I have also started to investigate methods for creating curves in the movement. One way I’ve thought about doing it starting one engine faster and steadily decrease while the other motor is starting at a lower speed and steadily increasing the speed.
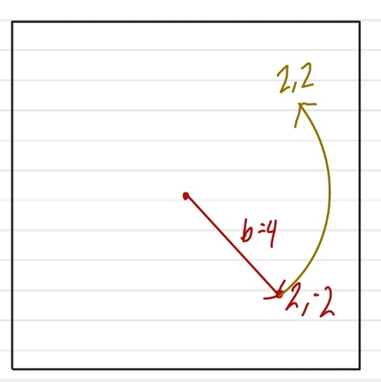
I have yet to test this, but it could look something like this:
aNrOfSteps = 40
bNrOfSteps = 20
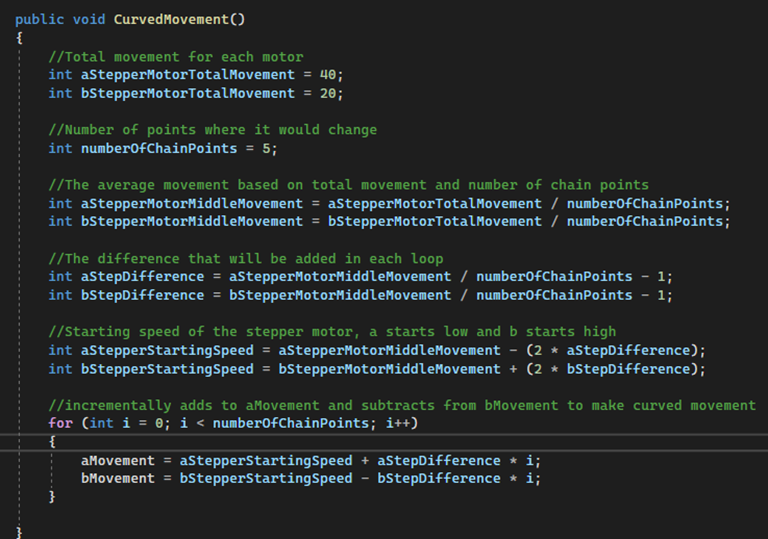
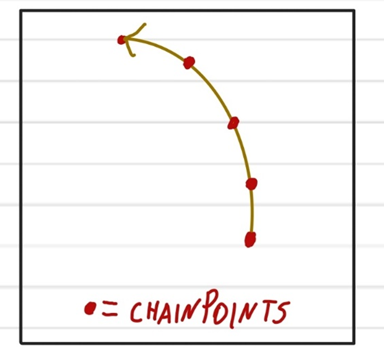
This code is still very flawed, as the time it will travel has not been accounted for, but as a base of concept, I believe I’m on the right path. The safest way of creating this would be to make different arrays for different number of chain points which would be filled with numbers we know work with the amount of chain points.
Next, I would like to change how the boundaries I have implemented works. Right now, they are just listed like below.
In simulations I just did a check to see if it hit the wall and if the target hit the wall, it would just slide along it. However, a way safer system would be to calculate this into the creation of the target speed, this could ensure it would never hit the wall at all. This might be quite simple to do in a straight vector, as we will know what the different boundaries will be in our real implementation, calculating this in a curve is way more complicated and needs to be further investigated.
Fredrik (Data):
I didn’t do alot this week, due to an exam and other classes.
Vetle (Electrical):
This week I have been busy with exams and assignments, so I have not had a lot of time to spend on the project this week.
Kadir (Mechanical):
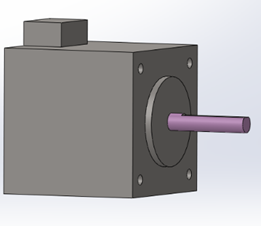
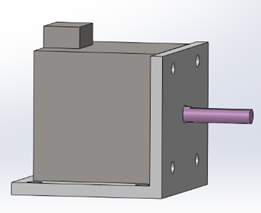
This week I worked on the player shooter system. After reviewing several design, we went for a design that is a turret with laser to target the player. Me and Hans also worked together to draw mounts for the new engine and, wheels.
I am also training to simulate and perform Fem analysis.
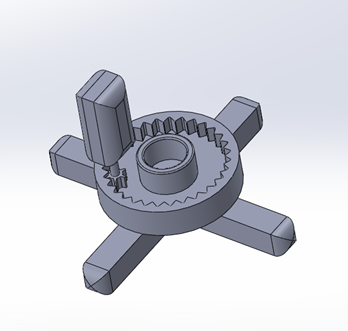
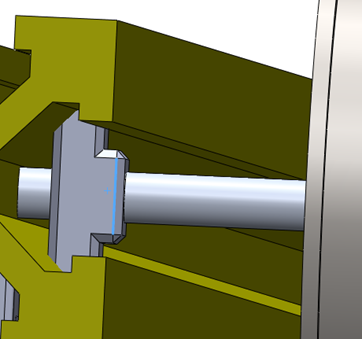
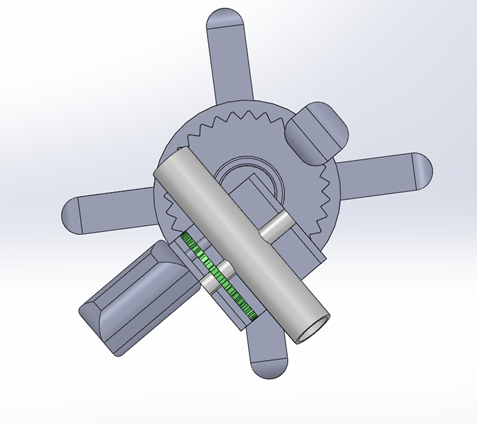
Combined drawing Hans and Kadir :
Hans (Mechanical):
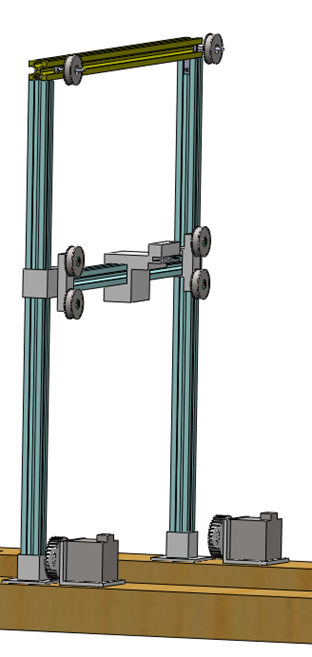
This week we landed on a set of motors for our system.
It has also been drawn new fastening material (With Kadir) that fits the profiles supplied by USN.
Working on Fem Analyses.