Creepy Coders (Data):
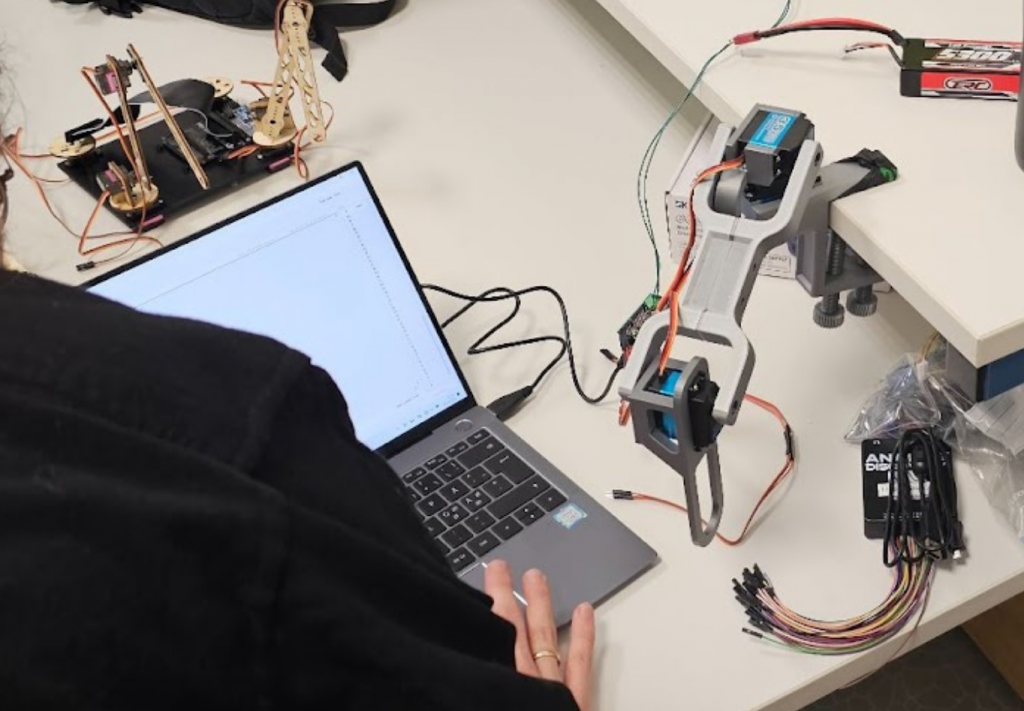
Denne uken har bestått av mye prøving og feiling. Uken har vært litt amputert pga. konteeksamener, men vi har troen på at vi nå har et fundament vi kan bygge videre på. Vi har nå en fungerende prototype. Vi har litt trøbbel med jitter i systemet så vi må prøve løse dette neste uke.
Spider Manufacturers (Maskin):
Vi har alle sammen sett på ulike løsninger som finnes for selve strukturen, demping og designet for selve roboten, i tillegg har vi blitt enige om å lagre artikler og litteratur slik at vi kan henvise til data om det er aktuelt. Blant annet har vi brukt tid på biblioteket for å gjøre research.
I tillegg har vi også blitt enige etter tilbakemelding fra foreleserne under midtveispresentasjonen, at vi skal produsere en prototype med 6 bein og en base. Dette er for at Creepy Coders skal kunne begynne med testing i større grad.
Individuelle innlegg
Ole Martin:
Uken startet rolig mens vi ventet på servomotorer for å påbegynne monteringen av den tredje testriggen. I mellomtiden designet og produserte jeg en støtdemper for å teste ulike fjærer til bruk som demping i det siste leddet på edderkoppens ben.
Støtdemperen er konstruert slik at den har et avtagbart lokk, som gjør det enkelt å bytte ut fjærer med varierende stivhet.
Når servoene ankom og monteringen skulle starte, oppdaget jeg at målene fra leverandørens tekniske tegninger ikke stemte. Festepunktene avvek med 3 mm fra spesifikasjonene, noe som gjorde at delene ikke passet sammen.
For å løse dette, modifiserte jeg noen mindre deler og laget spacere til festeanordningen for servoene og midtarmsdelen. Med disse justeringene klarte jeg å montere armen slik at den ble funksjonell og klar til bruk.
Vinay:
Denne uken har jeg gjort research på ulike strukturer og design for roboten. Blant annet har jeg lest meg opp på ulike artikler, blant annet denne:
( Karakurt, T., Durdu, A., & Yilmaz, N. (2015). Design of six legged spider robot and evolving walking algorithms. International Journal of Machine Learning and Computing, 5(2), 96-100: https://d1wqtxts1xzle7.cloudfront.net/112258172/8f0b19b60a570e0d9824ab953fd7110eca29-libre.pdf?1710006818=&response-content-disposition=inline%3B+filename%3DDesign_of_Six_Legged_Spider_Robot_and_Ev.pdf&Expires=1727721187&Signature=eKXJz2DQBp~A6t-LCRJcB~z2FWpKt0i6PsLY2bQVbzLhsoUSb-b6h1P36M9NYGPOCb5FefoMmAy5-JI6lAGdoPqys2U3OsNl4XSQoqBJZ0y47eXtm6oFtamCwQdaWKbRNXpqfeUF~EH2AAYSLtKYSXYFifWZ5ui7Jh~zhn-k91KtqVAh7qV8Qx54suzC-4Q6A4nMoFQJCE3L86kqEpDouSJZu1St1-IU3nyAPWZUndbZVULS2oXG1mHxGnPsER7QfaMJ1ajplsvTEqP3-wDnDAXP0WHW-JraVqLoaU7nH9ZJ2PZp4Yp9IV8UyRGpe3mj6pRETooQaRTHpca1GPB9Kw__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA )
Artikkelen handler om en robot med seks bein, som skal brukes til søk- og redningsoppdrag. Den kan i ulike terreng, ved hjelp av spesielle måter å bevege seg på. Samtidig som artikkelen viser til litt om strukturen, komponenter og mål på roboten.
Ved å gjøre slik research, kan jeg vurdere ulike løsninger sammen med de andre maskinstudentene, slik at vi får modellert og produsert en prototype for at data studentene kan få testet flere funksjoner samtidig.
Denne uken har det også gått med tid på å få ferdigstilt midtveispresentasjonen i emnet.
Kristian:
Den siste uka har vært ganske rolig, så jeg har brukt litt tid på å se etter relevante artikler i tillegg til å forberede til midtveispresentasjonen. Planen fremover er å fikse og videreutvikle 3D modellen til prototypebeinet (siden noen dimensjoner på motorene var feil), og forberede på å lage en fullstendig prototype med 6 bein.
Martin:
Sånn på overflaten kan det se ut som denne uken besto av svært lite fremgang. Men, jeg har klokket inn veldig mange timer i dykk i dokumentasjonen av den nye servomodulen og i konstruering av strømforsyning.

Strømforsyningen består nå av et kraftig batteri fra en RC-bil (7.4v 2S Lipo batteri) og en buck-converter som skal forsyne raspberri pi’en med 5V. Jeg fikk god øving i feilsøking da jeg satt en evighet for å prøve få kontakt med den nye servomodulen. Feilsøkingen besto av å installere drivere, reinstallere drivere, lesing av forum og å rive meg i håret… Det viste seg at det finnes usb kabler som IKKE har datalinjer (dette er kunnskap jeg skulle ønske hadde før jeg begikk meg ut på dette). Servomodulen var plug & play da jeg brukte korrekt kabel.
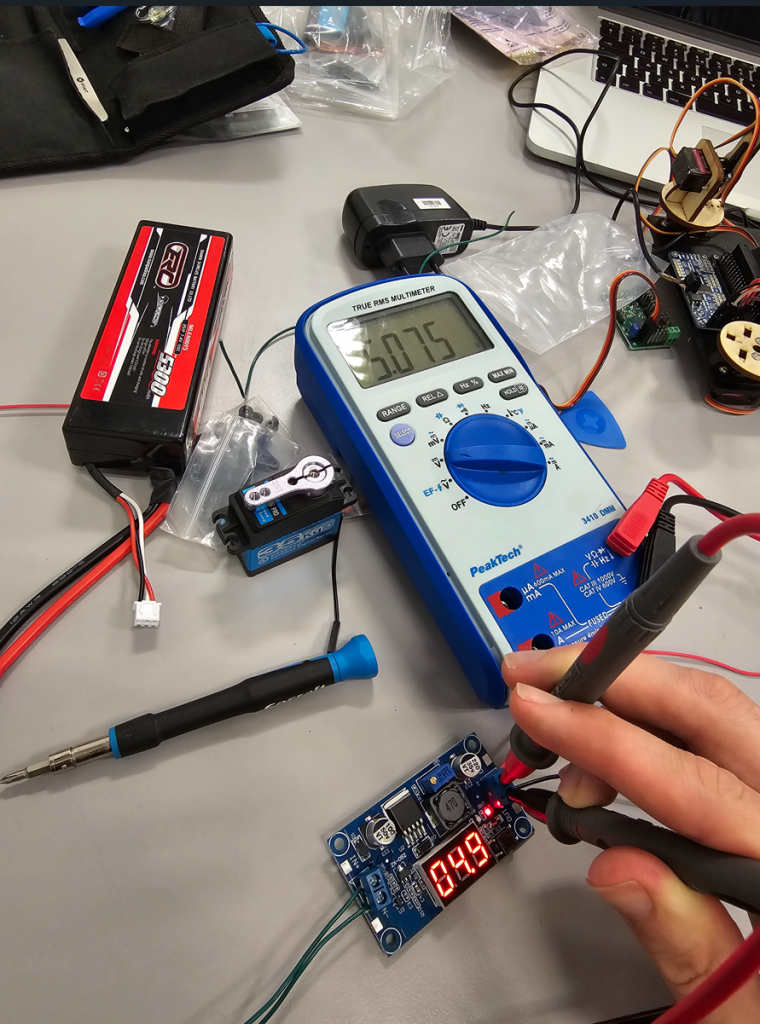
En annen flause denne uken var at jeg klarte prestere å brenne opp en Raspberri Pi. Dette orker jeg ikke snakke om. Anbefaler ingen å kjøre 7volt gjennom RX pin’en!
Jeg ser frem til neste uke og håper på mindre tragedier!
Mine kommende arbeidsoppgaver innen software blir å starte sette opp et en kodebase i python. Og da det gjelder hardware skal jeg prøve få bukt med jitter i systemet.

Ida:
Denne uken har jeg sett på ulike sensorer som kan brukes til å registrere hindringer for å unngå at roboten kolliderer. Jeg har lest om lignende prosjekter hvor en ultrasonic sensor har blitt brukt, derfor skal jeg bruke dette videre og teste ulike python-koder.
Didrik:
Jeg har sett på ulike sensorer som kan bli benyttet for at vår edderkopp kan bevege seg i omgivelsene sine uten at den kolliderer eller faller, men siden uken etter denne hadde konte eksamener så har jeg ikke fått gjort så mye ellers. Neste uke så vil de eksamenene være over, så da kan jeg fokusere enda mer på prosjektet nå som vi har servoer som vi kan teste ut fysisk.
Bjørn Ole:
Denne uken har jeg gjort ferdig et Activity diagram. Dette er helt basic og kan måtte forandres flere ganger, da testingen av systemet gjør at endringer er nødvendig.
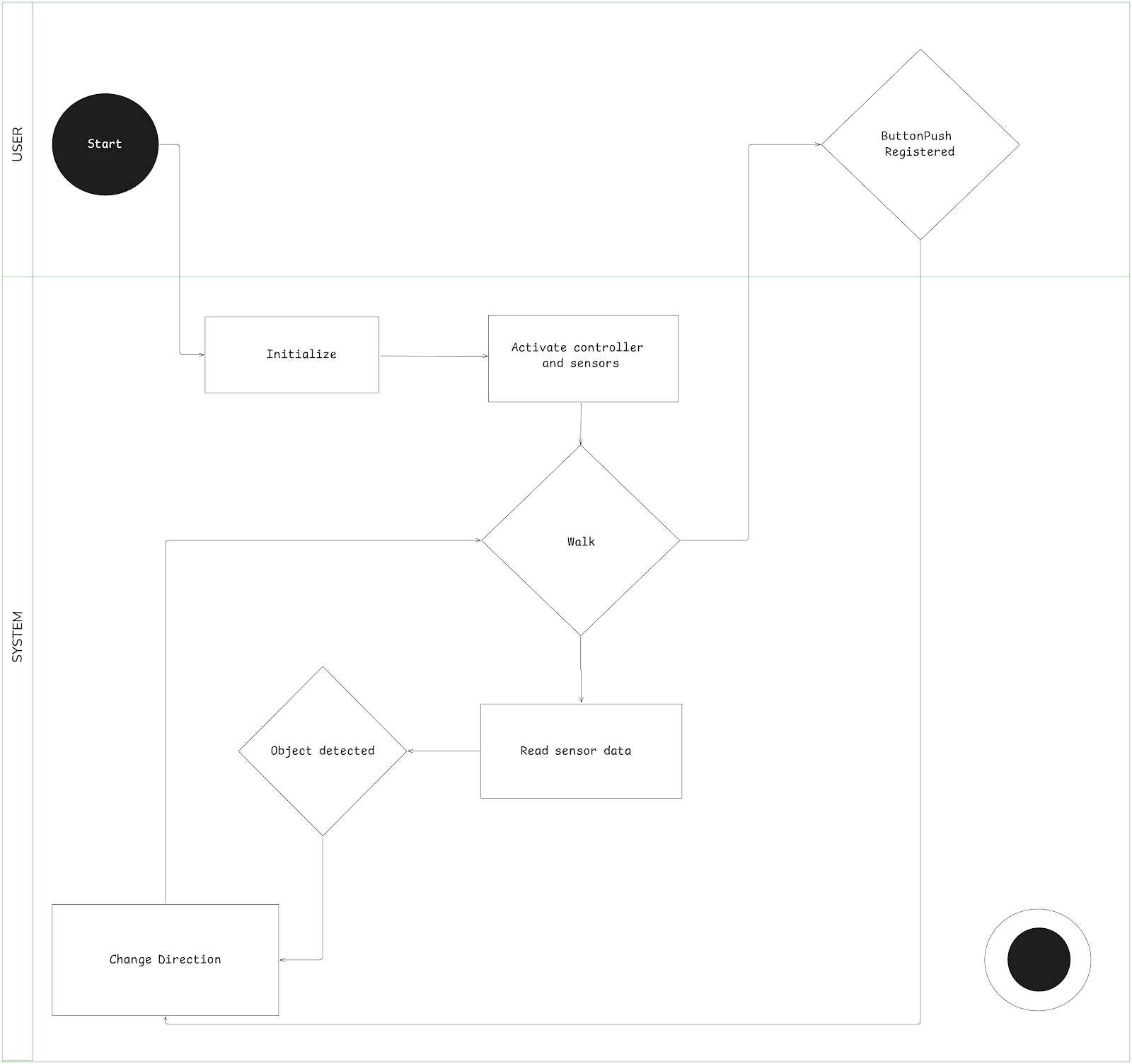
Like før innlegget skulle publiseres oppdaget jeg at ingen objekter i diagrammet leder til {END}. Så dette er en “evighetsmaskin”, men dette blir rettet opp i, i dokumentasjonen.
Her har jeg nå lært at det er viktig å lagre hvert enkelt diagram FØR jeg gjør endringer, slik at man har en historikk å vise til, for dokumentasjon. Resten av uken har dessverre for min del gått med til å forberede konte-eksamen(er).